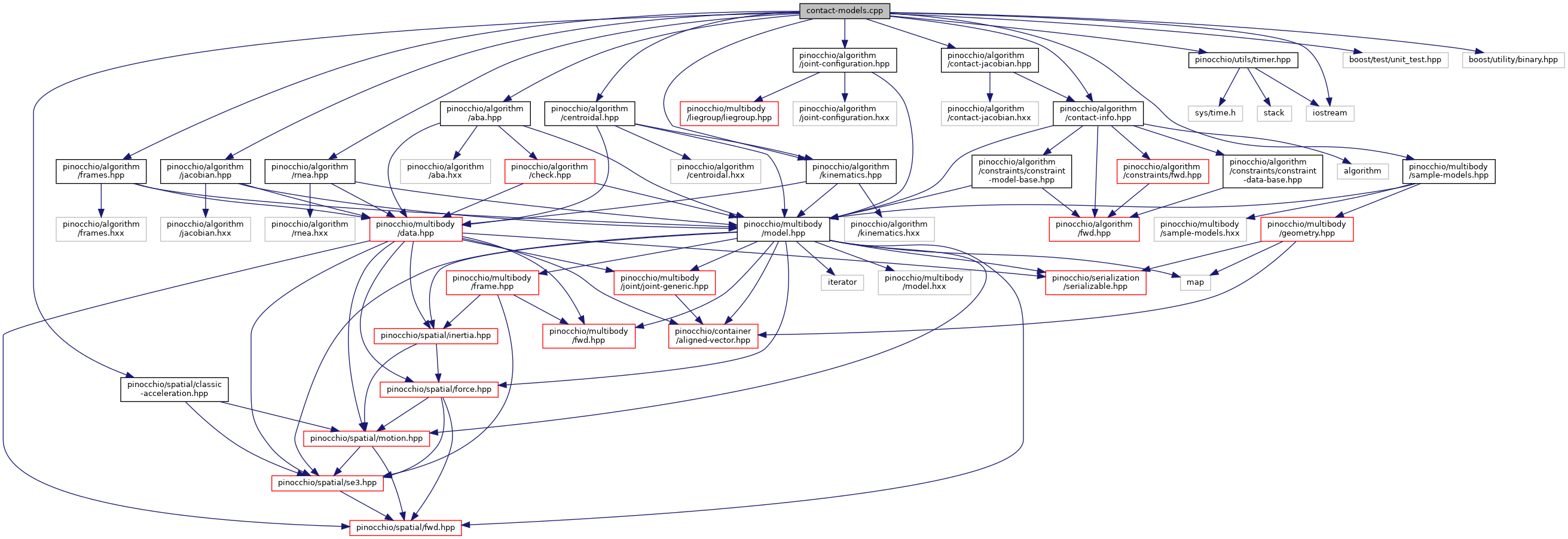
#include "pinocchio/algorithm/aba.hpp"#include "pinocchio/algorithm/rnea.hpp"#include "pinocchio/algorithm/frames.hpp"#include "pinocchio/algorithm/jacobian.hpp"#include "pinocchio/algorithm/centroidal.hpp"#include "pinocchio/algorithm/kinematics.hpp"#include "pinocchio/algorithm/contact-info.hpp"#include "pinocchio/algorithm/contact-jacobian.hpp"#include "pinocchio/algorithm/joint-configuration.hpp"#include "pinocchio/multibody/sample-models.hpp"#include "pinocchio/utils/timer.hpp"#include "pinocchio/spatial/classic-acceleration.hpp"#include <iostream>#include <boost/test/unit_test.hpp>#include <boost/utility/binary.hpp>
Include dependency graph for contact-models.cpp:
Go to the source code of this file.
Functions | |
| BOOST_AUTO_TEST_CASE (contact_models) | |
| BOOST_AUTO_TEST_CASE (contact_models_sparsity_and_jacobians) | |
| void | check_A1_and_A2 (const Model &model, const Data &data, const RigidConstraintModel &cmodel, RigidConstraintData &cdata) |
| template<typename T > | |
| bool | within (const T &elt, const std::vector< T > &vec) |
| template<typename Matrix > | |
| bool | within (const typename Matrix::Scalar &elt, const Eigen::MatrixBase< Matrix > &mat) |
Function Documentation
◆ BOOST_AUTO_TEST_CASE() [1/2]
| BOOST_AUTO_TEST_CASE | ( | contact_models | ) |
Definition at line 53 of file contact-models.cpp.
◆ BOOST_AUTO_TEST_CASE() [2/2]
| BOOST_AUTO_TEST_CASE | ( | contact_models_sparsity_and_jacobians | ) |
Definition at line 125 of file contact-models.cpp.
◆ check_A1_and_A2()
| void check_A1_and_A2 | ( | const Model & | model, |
| const Data & | data, | ||
| const RigidConstraintModel & | cmodel, | ||
| RigidConstraintData & | cdata | ||
| ) |
Definition at line 85 of file contact-models.cpp.
◆ within() [1/2]
template<typename T >
| bool within | ( | const T & | elt, |
| const std::vector< T > & | vec | ||
| ) |
Definition at line 27 of file contact-models.cpp.
◆ within() [2/2]
template<typename Matrix >
| bool within | ( | const typename Matrix::Scalar & | elt, |
| const Eigen::MatrixBase< Matrix > & | mat | ||
| ) |
Definition at line 39 of file contact-models.cpp.