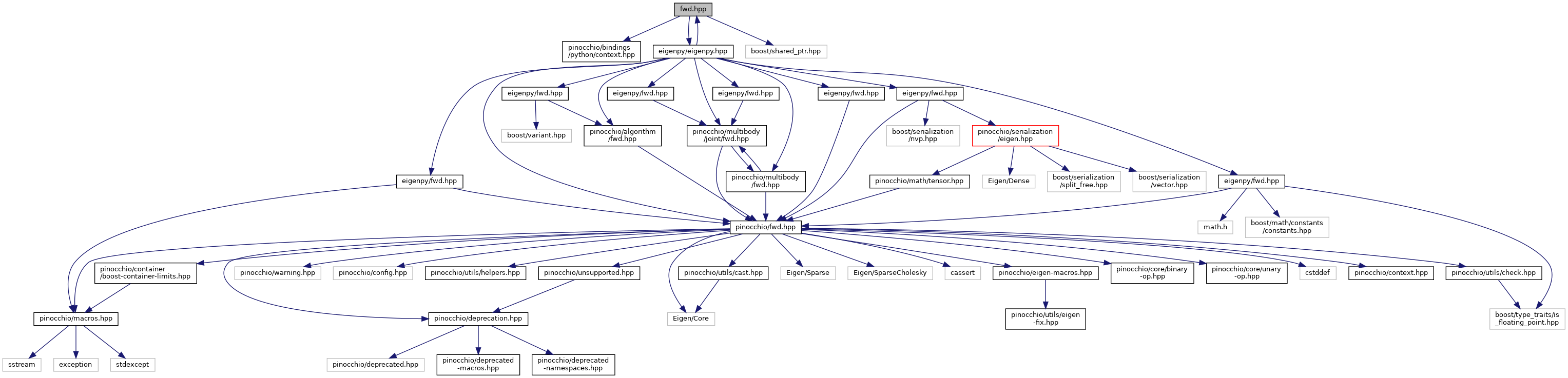
Include dependency graph for bindings/python/fwd.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::python | |
Macros | |
| #define | PINOCCHIO_SHARED_PTR_HOLDER_TYPE(T) ::std::shared_ptr<T> |
Functions | |
| void | pinocchio::python::exposeAlgorithms () |
| void | pinocchio::python::exposeConversions () |
| void | pinocchio::python::exposeData () |
| void | pinocchio::python::exposeEigenTypes () |
| void | pinocchio::python::exposeExplog () |
| void | pinocchio::python::exposeExtras () |
| void | pinocchio::python::exposeForce () |
| void | pinocchio::python::exposeFrame () |
| void | pinocchio::python::exposeGeometry () |
| void | pinocchio::python::exposeInertia () |
| void | pinocchio::python::exposeJoints () |
| void | pinocchio::python::exposeLanczosDecomposition () |
| void | pinocchio::python::exposeLieGroups () |
| void | pinocchio::python::exposeLinalg () |
| void | pinocchio::python::exposeModel () |
| void | pinocchio::python::exposeMotion () |
| void | pinocchio::python::exposeParsers () |
| void | pinocchio::python::exposeRpy () |
| void | pinocchio::python::exposeSampleModels () |
| void | pinocchio::python::exposeSE3 () |
| void | pinocchio::python::exposeSkew () |
| void | pinocchio::python::exposeSymmetric3 () |
| void | pinocchio::python::exposeTridiagonalMatrix () |
Macro Definition Documentation
◆ PINOCCHIO_SHARED_PTR_HOLDER_TYPE
| #define PINOCCHIO_SHARED_PTR_HOLDER_TYPE | ( | T | ) | ::std::shared_ptr<T> |
Definition at line 13 of file bindings/python/fwd.hpp.