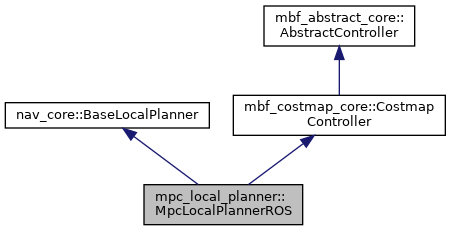
Implements both nav_core::BaseLocalPlanner and mbf_costmap_core::CostmapController abstract interfaces, so the teb_local_planner plugin can be used both in move_base and move_base_flex (MBF). More...
#include <mpc_local_planner_ros.h>
Classes | |
| struct | CostmapConverterPlugin |
| struct | Parameters |
Public Member Functions | |
| bool | cancel () |
| Requests the planner to cancel, e.g. if it takes too much time. More... | |
| uint32_t | computeVelocityCommands (const geometry_msgs::PoseStamped &pose, const geometry_msgs::TwistStamped &velocity, geometry_msgs::TwistStamped &cmd_vel, std::string &message) |
| Given the current position, orientation, and velocity of the robot, compute velocity commands to send to the base. More... | |
| bool | computeVelocityCommands (geometry_msgs::Twist &cmd_vel) |
| Given the current position, orientation, and velocity of the robot, compute velocity commands to send to the base. More... | |
| void | initialize (std::string name, tf2_ros::Buffer *tf, costmap_2d::Costmap2DROS *costmap_ros) |
| Initializes the teb plugin. More... | |
| bool | isGoalReached () |
| Check if the goal pose has been achieved. More... | |
| bool | isGoalReached (double xy_tolerance, double yaw_tolerance) |
| Dummy version to satisfy MBF API. More... | |
| MpcLocalPlannerROS () | |
| Default constructor of the plugin. More... | |
| bool | setPlan (const std::vector< geometry_msgs::PoseStamped > &orig_global_plan) |
| Set the plan that the teb local planner is following. More... | |
| ~MpcLocalPlannerROS () | |
| Destructor of the plugin. More... | |
 Public Member Functions inherited from nav_core::BaseLocalPlanner Public Member Functions inherited from nav_core::BaseLocalPlanner | |
| virtual | ~BaseLocalPlanner () |
| Public Member Functions inherited from mbf_costmap_core::CostmapController | |
| virtual void | initialize (std::string name, ::TF *tf, costmap_2d::Costmap2DROS *costmap_ros)=0 |
| virtual | ~CostmapController () |
| Public Member Functions inherited from mbf_abstract_core::AbstractController | |
| virtual | ~AbstractController () |
Private Types | |
| using | CircularObstacle = teb_local_planner::CircularObstacle |
| using | LineObstacle = teb_local_planner::LineObstacle |
| using | ObstaclePtr = teb_local_planner::ObstaclePtr |
| using | ObstContainer = teb_local_planner::ObstContainer |
| using | Point2dContainer = teb_local_planner::Point2dContainer |
| using | PointObstacle = teb_local_planner::PointObstacle |
| using | PolygonObstacle = teb_local_planner::PolygonObstacle |
| using | PoseSE2 = teb_local_planner::PoseSE2 |
| using | RobotFootprintModelPtr = teb_local_planner::RobotFootprintModelPtr |
| using | ViaPointContainer = std::vector< PoseSE2 > |
Public utility functions/methods | |
| costmap_2d::Costmap2DROS * | _costmap_ros |
| Pointer to the costmap ros wrapper, received from the navigation stack. More... | |
| costmap_2d::Costmap2D * | _costmap |
| Pointer to the 2d costmap (obtained from the costmap ros wrapper) More... | |
| tf2_ros::Buffer * | _tf |
| pointer to tf buffer More... | |
| Controller | _controller |
| ObstContainer | _obstacles |
| Obstacle vector that should be considered during local trajectory optimization. More... | |
| Publisher | _publisher |
| std::shared_ptr< base_local_planner::CostmapModel > | _costmap_model |
| corbo::TimeSeries::Ptr | _x_seq = std::make_shared<corbo::TimeSeries>() |
| corbo::TimeSeries::Ptr | _u_seq = std::make_shared<corbo::TimeSeries>() |
| std::vector< geometry_msgs::PoseStamped > | _global_plan |
| Store the current global plan. More... | |
| base_local_planner::OdometryHelperRos | _odom_helper |
| Provides an interface to receive the current velocity from the robot. More... | |
| pluginlib::ClassLoader< costmap_converter::BaseCostmapToPolygons > | _costmap_converter_loader |
| Load costmap converter plugins at runtime. More... | |
| boost::shared_ptr< costmap_converter::BaseCostmapToPolygons > | _costmap_converter |
| Store the current costmap_converter. More... | |
| ros::Subscriber | _custom_obst_sub |
| Subscriber for custom obstacles received via a ObstacleMsg. More... | |
| std::mutex | _custom_obst_mutex |
| Mutex that locks the obstacle array (multi-threaded) More... | |
| costmap_converter::ObstacleArrayMsg | _custom_obstacle_msg |
| Copy of the most recent obstacle message. More... | |
| ViaPointContainer | _via_points |
| ros::Subscriber | _via_points_sub |
| Subscriber for custom via-points received via a Path msg. More... | |
| bool | _custom_via_points_active = false |
| Keep track whether valid via-points have been received from via_points_sub_. More... | |
| std::mutex | _via_point_mutex |
| Mutex that locks the via_points container (multi-threaded) More... | |
| PoseSE2 | _robot_pose |
| Store current robot pose. More... | |
| PoseSE2 | _robot_goal |
| Store current robot goal. More... | |
| geometry_msgs::Twist | _robot_vel |
| Store current robot translational and angular velocity (vx, vy, omega) More... | |
| bool | _goal_reached = false |
| store whether the goal is reached or not More... | |
| ros::Time | _time_last_infeasible_plan |
| Store at which time stamp the last infeasible plan was detected. More... | |
| int | _no_infeasible_plans = 0 |
| Store how many times in a row the planner failed to find a feasible plan. More... | |
| geometry_msgs::Twist | _last_cmd |
| Store the last control command generated in computeVelocityCommands() More... | |
| ros::Time | _time_last_cmd |
| RobotFootprintModelPtr | _robot_model |
| std::vector< geometry_msgs::Point > | _footprint_spec |
| Store the footprint of the robot. More... | |
| double | _robot_inscribed_radius |
| The radius of the inscribed circle of the robot (collision possible) More... | |
| double | _robot_circumscribed_radius |
| The radius of the circumscribed circle of the robot. More... | |
| std::string | _global_frame |
| The frame in which the controller will run. More... | |
| std::string | _robot_base_frame |
| Used as the base frame id of the robot. More... | |
| bool | _initialized |
| Keeps track about the correct initialization of this class. More... | |
| struct mpc_local_planner::MpcLocalPlannerROS::Parameters | _params |
| struct mpc_local_planner::MpcLocalPlannerROS::CostmapConverterPlugin | _costmap_conv_params |
| static Eigen::Vector2d | tfPoseToEigenVector2dTransRot (const tf::Pose &tf_vel) |
| Transform a tf::Pose type into a Eigen::Vector2d containing the translational and angular velocities. More... | |
| static RobotFootprintModelPtr | getRobotFootprintFromParamServer (const ros::NodeHandle &nh, costmap_2d::Costmap2DROS *costmap_ros=nullptr) |
| Get the current robot footprint/contour model. More... | |
| static RobotFootprintModelPtr | getRobotFootprintFromCostmap2d (costmap_2d::Costmap2DROS &costmap_ros) |
| Get the current robot footprint/contour model. More... | |
| static Point2dContainer | makeFootprintFromXMLRPC (XmlRpc::XmlRpcValue &footprint_xmlrpc, const std::string &full_param_name) |
| Set the footprint from the given XmlRpcValue. More... | |
| static double | getNumberFromXMLRPC (XmlRpc::XmlRpcValue &value, const std::string &full_param_name) |
| Get a number from the given XmlRpcValue. More... | |
| void | updateObstacleContainerWithCostmap () |
| Update internal obstacle vector based on occupied costmap cells. More... | |
| void | updateObstacleContainerWithCostmapConverter () |
| Update internal obstacle vector based on polygons provided by a costmap_converter plugin. More... | |
| void | updateObstacleContainerWithCustomObstacles () |
| Update internal obstacle vector based on custom messages received via subscriber. More... | |
| void | updateViaPointsContainer (const std::vector< geometry_msgs::PoseStamped > &transformed_plan, double min_separation) |
| Update internal via-point container based on the current reference plan. More... | |
| void | customObstacleCB (const costmap_converter::ObstacleArrayMsg::ConstPtr &obst_msg) |
| Callback for the dynamic_reconfigure node. More... | |
| void | customViaPointsCB (const nav_msgs::Path::ConstPtr &via_points_msg) |
| Callback for custom via-points. More... | |
| bool | pruneGlobalPlan (const tf2_ros::Buffer &tf, const geometry_msgs::PoseStamped &global_pose, std::vector< geometry_msgs::PoseStamped > &global_plan, double dist_behind_robot=1) |
| Prune global plan such that already passed poses are cut off. More... | |
| bool | transformGlobalPlan (const tf2_ros::Buffer &tf, const std::vector< geometry_msgs::PoseStamped > &global_plan, const geometry_msgs::PoseStamped &global_pose, const costmap_2d::Costmap2D &costmap, const std::string &global_frame, double max_plan_length, std::vector< geometry_msgs::PoseStamped > &transformed_plan, int *current_goal_idx=NULL, geometry_msgs::TransformStamped *tf_plan_to_global=NULL) const |
| Transforms the global plan of the robot from the planner frame to the local frame (modified). More... | |
| double | estimateLocalGoalOrientation (const std::vector< geometry_msgs::PoseStamped > &global_plan, const geometry_msgs::PoseStamped &local_goal, int current_goal_idx, const geometry_msgs::TransformStamped &tf_plan_to_global, int moving_average_length=3) const |
| Estimate the orientation of a pose from the global_plan that is treated as a local goal for the local planner. More... | |
| void | validateFootprints (double opt_inscribed_radius, double costmap_inscribed_radius, double min_obst_dist) |
| Validate current parameter values of the footprint for optimization, obstacle distance and the costmap footprint. More... | |
Additional Inherited Members | |
| Public Types inherited from mbf_costmap_core::CostmapController | |
| typedef boost::shared_ptr< ::mbf_costmap_core::CostmapController > | Ptr |
| Public Types inherited from mbf_abstract_core::AbstractController | |
| typedef boost::shared_ptr< ::mbf_abstract_core::AbstractController > | Ptr |
| Protected Member Functions inherited from nav_core::BaseLocalPlanner | |
| BaseLocalPlanner () | |
| Protected Member Functions inherited from mbf_costmap_core::CostmapController | |
| CostmapController () | |
| Protected Member Functions inherited from mbf_abstract_core::AbstractController | |
| AbstractController () | |
Detailed Description
Implements both nav_core::BaseLocalPlanner and mbf_costmap_core::CostmapController abstract interfaces, so the teb_local_planner plugin can be used both in move_base and move_base_flex (MBF).
- Todo:
- Escape behavior, more efficient obstacle handling
Definition at line 97 of file mpc_local_planner_ros.h.
Member Typedef Documentation
◆ CircularObstacle
|
private |
Definition at line 107 of file mpc_local_planner_ros.h.
◆ LineObstacle
Definition at line 108 of file mpc_local_planner_ros.h.
◆ ObstaclePtr
Definition at line 105 of file mpc_local_planner_ros.h.
◆ ObstContainer
|
private |
Definition at line 102 of file mpc_local_planner_ros.h.
◆ Point2dContainer
|
private |
Definition at line 101 of file mpc_local_planner_ros.h.
◆ PointObstacle
|
private |
Definition at line 106 of file mpc_local_planner_ros.h.
◆ PolygonObstacle
|
private |
Definition at line 109 of file mpc_local_planner_ros.h.
◆ PoseSE2
Definition at line 99 of file mpc_local_planner_ros.h.
◆ RobotFootprintModelPtr
|
private |
Definition at line 100 of file mpc_local_planner_ros.h.
◆ ViaPointContainer
|
private |
Definition at line 103 of file mpc_local_planner_ros.h.
Constructor & Destructor Documentation
◆ MpcLocalPlannerROS()
| mpc_local_planner::MpcLocalPlannerROS::MpcLocalPlannerROS | ( | ) |
Default constructor of the plugin.
Definition at line 64 of file mpc_local_planner_ros.cpp.
◆ ~MpcLocalPlannerROS()
| mpc_local_planner::MpcLocalPlannerROS::~MpcLocalPlannerROS | ( | ) |
Destructor of the plugin.
Definition at line 77 of file mpc_local_planner_ros.cpp.
Member Function Documentation
◆ cancel()
|
inlinevirtual |
Requests the planner to cancel, e.g. if it takes too much time.
- Remarks
- New on MBF API
- Returns
- True if a cancel has been successfully requested, false if not implemented.
Implements mbf_costmap_core::CostmapController.
Definition at line 192 of file mpc_local_planner_ros.h.
◆ computeVelocityCommands() [1/2]
|
virtual |
Given the current position, orientation, and velocity of the robot, compute velocity commands to send to the base.
- Remarks
- Extended version for MBF API
- Parameters
-
pose the current pose of the robot. velocity the current velocity of the robot. cmd_vel Will be filled with the velocity command to be passed to the robot base. message Optional more detailed outcome as a string
- Returns
- Result code as described on ExePath action result: SUCCESS = 0 1..9 are reserved as plugin specific non-error results FAILURE = 100 Unspecified failure, only used for old, non-mfb_core based plugins CANCELED = 101 NO_VALID_CMD = 102 PAT_EXCEEDED = 103 COLLISION = 104 OSCILLATION = 105 ROBOT_STUCK = 106 MISSED_GOAL = 107 MISSED_PATH = 108 BLOCKED_PATH = 109 INVALID_PATH = 110 TF_ERROR = 111 NOT_INITIALIZED = 112 INVALID_PLUGIN = 113 INTERNAL_ERROR = 114 121..149 are reserved as plugin specific errors
Implements mbf_costmap_core::CostmapController.
Definition at line 247 of file mpc_local_planner_ros.cpp.
◆ computeVelocityCommands() [2/2]
|
virtual |
Given the current position, orientation, and velocity of the robot, compute velocity commands to send to the base.
- Parameters
-
cmd_vel Will be filled with the velocity command to be passed to the robot base
- Returns
- True if a valid trajectory was found, false otherwise
Implements nav_core::BaseLocalPlanner.
Definition at line 237 of file mpc_local_planner_ros.cpp.
◆ customObstacleCB()
|
protected |
Callback for the dynamic_reconfigure node.
This callback allows to modify parameters dynamically at runtime without restarting the node
- Parameters
-
config Reference to the dynamic reconfigure config level Dynamic reconfigure level
Callback for custom obstacles that are not obtained from the costmap
- Parameters
-
obst_msg pointer to the message containing a list of polygon shaped obstacles
Definition at line 847 of file mpc_local_planner_ros.cpp.
◆ customViaPointsCB()
|
protected |
Callback for custom via-points.
- Parameters
-
via_points_msg pointer to the message containing a list of via-points
Definition at line 853 of file mpc_local_planner_ros.cpp.
◆ estimateLocalGoalOrientation()
|
protected |
Estimate the orientation of a pose from the global_plan that is treated as a local goal for the local planner.
If the current (local) goal point is not the final one (global) substitute the goal orientation by the angle of the direction vector between the local goal and the subsequent pose of the global plan. This is often helpful, if the global planner does not consider orientations.
A moving average filter is utilized to smooth the orientation.
- Parameters
-
global_plan The global plan local_goal Current local goal current_goal_idx Index of the current (local) goal pose in the global plan [out] tf_plan_to_global Transformation between the global plan and the global planning frame moving_average_length number of future poses of the global plan to be taken into account
- Returns
- orientation (yaw-angle) estimate
Definition at line 791 of file mpc_local_planner_ros.cpp.
◆ getNumberFromXMLRPC()
|
static |
Get a number from the given XmlRpcValue.
- Remarks
- This method is copied from costmap_2d/footprint.h, since it is not declared public in all ros distros
- It is modified in order to return a container of Eigen::Vector2d instead of geometry_msgs::Point
- Parameters
-
value double value type full_param_name this is the full name of the rosparam from which the footprint_xmlrpc value came. It is used only for reporting errors.
- Returns
- double value
Definition at line 1069 of file mpc_local_planner_ros.cpp.
◆ getRobotFootprintFromCostmap2d()
|
static |
Get the current robot footprint/contour model.
- Parameters
-
costmap_ros reference to an intialized instance of costmap_2d::Costmap2dROS
- Returns
- Robot footprint model used for optimization
Definition at line 1014 of file mpc_local_planner_ros.cpp.
◆ getRobotFootprintFromParamServer()
|
static |
Get the current robot footprint/contour model.
- Parameters
-
nh const reference to the local ros::NodeHandle costmap_ros pointer to an intialized instance of costmap_2d::Costmap2dROS
- Returns
- Robot footprint model used for optimization
Definition at line 874 of file mpc_local_planner_ros.cpp.
◆ initialize()
|
virtual |
Initializes the teb plugin.
- Parameters
-
name The name of the instance tf Pointer to a tf buffer costmap_ros Cost map representing occupied and free space
Implements nav_core::BaseLocalPlanner.
Definition at line 86 of file mpc_local_planner_ros.cpp.
◆ isGoalReached() [1/2]
|
virtual |
Check if the goal pose has been achieved.
The actual check is performed in computeVelocityCommands(). Only the status flag is checked here.
- Returns
- True if achieved, false otherwise
Implements nav_core::BaseLocalPlanner.
Definition at line 447 of file mpc_local_planner_ros.cpp.
◆ isGoalReached() [2/2]
|
inlinevirtual |
Dummy version to satisfy MBF API.
Implements mbf_costmap_core::CostmapController.
Definition at line 185 of file mpc_local_planner_ros.h.
◆ makeFootprintFromXMLRPC()
|
static |
Set the footprint from the given XmlRpcValue.
- Remarks
- This method is copied from costmap_2d/footprint.h, since it is not declared public in all ros distros
- It is modified in order to return a container of Eigen::Vector2d instead of geometry_msgs::Point
- Parameters
-
footprint_xmlrpc should be an array of arrays, where the top-level array should have 3 or more elements, and the sub-arrays should all have exactly 2 elements (x and y coordinates). full_param_name this is the full name of the rosparam from which the footprint_xmlrpc value came. It is used only for reporting errors.
- Returns
- container of vertices describing the polygon
Definition at line 1030 of file mpc_local_planner_ros.cpp.
◆ pruneGlobalPlan()
|
protected |
Prune global plan such that already passed poses are cut off.
The pose of the robot is transformed into the frame of the global plan by taking the most recent tf transform. If no valid transformation can be found, the method returns false. The global plan is pruned until the distance to the robot is at least dist_behind_robot. If no pose within the specified treshold dist_behind_robot can be found, nothing will be pruned and the method returns false.
- Remarks
- Do not choose
dist_behind_robottoo small (not smaller the cellsize of the map), otherwise nothing will be pruned.
- Parameters
-
tf A reference to a tf buffer global_pose The global pose of the robot [in,out] global_plan The plan to be transformed dist_behind_robot Distance behind the robot that should be kept [meters]
- Returns
trueif the plan is pruned,falsein case of a transform exception or if no pose cannot be found inside the threshold
Definition at line 629 of file mpc_local_planner_ros.cpp.
◆ setPlan()
|
virtual |
Set the plan that the teb local planner is following.
- Parameters
-
orig_global_plan The plan to pass to the local planner
- Returns
- True if the plan was updated successfully, false otherwise
Implements mbf_costmap_core::CostmapController.
Definition at line 215 of file mpc_local_planner_ros.cpp.
◆ tfPoseToEigenVector2dTransRot()
|
static |
Transform a tf::Pose type into a Eigen::Vector2d containing the translational and angular velocities.
Translational velocities (x- and y-coordinates) are combined into a single translational velocity (first component).
- Parameters
-
tf_vel tf::Pose message containing a 1D or 2D translational velocity (x,y) and an angular velocity (yaw-angle)
- Returns
- Translational and angular velocity combined into an Eigen::Vector2d
Definition at line 621 of file mpc_local_planner_ros.cpp.
◆ transformGlobalPlan()
|
protected |
Transforms the global plan of the robot from the planner frame to the local frame (modified).
The method replaces transformGlobalPlan as defined in base_local_planner/goal_functions.h such that the index of the current goal pose is returned as well as the transformation between the global plan and the planning frame.
- Parameters
-
tf A reference to a tf buffer global_plan The plan to be transformed global_pose The global pose of the robot costmap A reference to the costmap being used so the window size for transforming can be computed global_frame The frame to transform the plan to max_plan_length Specify maximum length (cumulative Euclidean distances) of the transformed plan [if <=0: disabled; the length is also bounded by the local costmap size!] [out] transformed_plan Populated with the transformed plan [out] current_goal_idx Index of the current (local) goal pose in the global plan [out] tf_plan_to_global Transformation between the global plan and the global planning frame
- Returns
trueif the global plan is transformed,falseotherwise
Definition at line 671 of file mpc_local_planner_ros.cpp.
◆ updateObstacleContainerWithCostmap()
|
protected |
Update internal obstacle vector based on occupied costmap cells.
- Remarks
- All occupied cells will be added as point obstacles.
- All previous obstacles are cleared.
- Todo:
Include temporal coherence among obstacle msgs (id vector)
Include properties for dynamic obstacles (e.g. using constant velocity model)
Definition at line 458 of file mpc_local_planner_ros.cpp.
◆ updateObstacleContainerWithCostmapConverter()
|
protected |
Update internal obstacle vector based on polygons provided by a costmap_converter plugin.
- Remarks
- Requires a loaded costmap_converter plugin.
- All previous obstacles are cleared.
Definition at line 485 of file mpc_local_planner_ros.cpp.
◆ updateObstacleContainerWithCustomObstacles()
|
protected |
Update internal obstacle vector based on custom messages received via subscriber.
- Remarks
- All previous obstacles are NOT cleared. Call this method after other update methods.
Definition at line 527 of file mpc_local_planner_ros.cpp.
◆ updateViaPointsContainer()
|
protected |
Update internal via-point container based on the current reference plan.
- Remarks
- All previous via-points will be cleared.
- Parameters
-
transformed_plan (local) portion of the global plan (which is already transformed to the planning frame) min_separation minimum separation between two consecutive via-points
Definition at line 603 of file mpc_local_planner_ros.cpp.
◆ validateFootprints()
|
protected |
Validate current parameter values of the footprint for optimization, obstacle distance and the costmap footprint.
This method prints warnings if validation fails.
- Remarks
- Currently, we only validate the inscribed radius of the footprints
- Parameters
-
opt_inscribed_radius Inscribed radius of the RobotFootprintModel for optimization costmap_inscribed_radius Inscribed radius of the footprint model used for the costmap min_obst_dist desired distance to obstacles
Definition at line 838 of file mpc_local_planner_ros.cpp.
Member Data Documentation
◆ _controller
|
private |
Definition at line 381 of file mpc_local_planner_ros.h.
◆ _costmap
|
private |
Pointer to the 2d costmap (obtained from the costmap ros wrapper)
Definition at line 377 of file mpc_local_planner_ros.h.
◆ _costmap_conv_params
|
private |
◆ _costmap_converter
|
private |
Store the current costmap_converter.
Definition at line 394 of file mpc_local_planner_ros.h.
◆ _costmap_converter_loader
|
private |
Load costmap converter plugins at runtime.
Definition at line 393 of file mpc_local_planner_ros.h.
◆ _costmap_model
|
private |
Definition at line 384 of file mpc_local_planner_ros.h.
◆ _costmap_ros
|
private |
Pointer to the costmap ros wrapper, received from the navigation stack.
Definition at line 376 of file mpc_local_planner_ros.h.
◆ _custom_obst_mutex
|
private |
Mutex that locks the obstacle array (multi-threaded)
Definition at line 399 of file mpc_local_planner_ros.h.
◆ _custom_obst_sub
|
private |
Subscriber for custom obstacles received via a ObstacleMsg.
Definition at line 398 of file mpc_local_planner_ros.h.
◆ _custom_obstacle_msg
|
private |
Copy of the most recent obstacle message.
Definition at line 400 of file mpc_local_planner_ros.h.
◆ _custom_via_points_active
|
private |
Keep track whether valid via-points have been received from via_points_sub_.
Definition at line 404 of file mpc_local_planner_ros.h.
◆ _footprint_spec
|
private |
Store the footprint of the robot.
Definition at line 418 of file mpc_local_planner_ros.h.
◆ _global_frame
|
private |
The frame in which the controller will run.
Definition at line 422 of file mpc_local_planner_ros.h.
◆ _global_plan
|
private |
Store the current global plan.
Definition at line 389 of file mpc_local_planner_ros.h.
◆ _goal_reached
|
private |
store whether the goal is reached or not
Definition at line 410 of file mpc_local_planner_ros.h.
◆ _initialized
|
private |
Keeps track about the correct initialization of this class.
Definition at line 426 of file mpc_local_planner_ros.h.
◆ _last_cmd
|
private |
Store the last control command generated in computeVelocityCommands()
Definition at line 413 of file mpc_local_planner_ros.h.
◆ _no_infeasible_plans
|
private |
Store how many times in a row the planner failed to find a feasible plan.
Definition at line 412 of file mpc_local_planner_ros.h.
◆ _obstacles
|
private |
Obstacle vector that should be considered during local trajectory optimization.
Definition at line 382 of file mpc_local_planner_ros.h.
◆ _odom_helper
|
private |
Provides an interface to receive the current velocity from the robot.
Definition at line 391 of file mpc_local_planner_ros.h.
◆ _params
|
private |
◆ _publisher
|
private |
Definition at line 383 of file mpc_local_planner_ros.h.
◆ _robot_base_frame
|
private |
Used as the base frame id of the robot.
Definition at line 423 of file mpc_local_planner_ros.h.
◆ _robot_circumscribed_radius
|
private |
The radius of the circumscribed circle of the robot.
Definition at line 420 of file mpc_local_planner_ros.h.
◆ _robot_goal
|
private |
Store current robot goal.
Definition at line 408 of file mpc_local_planner_ros.h.
◆ _robot_inscribed_radius
|
private |
The radius of the inscribed circle of the robot (collision possible)
Definition at line 419 of file mpc_local_planner_ros.h.
◆ _robot_model
|
private |
Definition at line 416 of file mpc_local_planner_ros.h.
◆ _robot_pose
|
private |
Store current robot pose.
Definition at line 407 of file mpc_local_planner_ros.h.
◆ _robot_vel
|
private |
Store current robot translational and angular velocity (vx, vy, omega)
Definition at line 409 of file mpc_local_planner_ros.h.
◆ _tf
|
private |
pointer to tf buffer
Definition at line 378 of file mpc_local_planner_ros.h.
◆ _time_last_cmd
|
private |
Definition at line 414 of file mpc_local_planner_ros.h.
◆ _time_last_infeasible_plan
|
private |
Store at which time stamp the last infeasible plan was detected.
Definition at line 411 of file mpc_local_planner_ros.h.
◆ _u_seq
|
private |
Definition at line 387 of file mpc_local_planner_ros.h.
◆ _via_point_mutex
|
private |
Mutex that locks the via_points container (multi-threaded)
Definition at line 405 of file mpc_local_planner_ros.h.
◆ _via_points
|
private |
Definition at line 402 of file mpc_local_planner_ros.h.
◆ _via_points_sub
|
private |
Subscriber for custom via-points received via a Path msg.
Definition at line 403 of file mpc_local_planner_ros.h.
◆ _x_seq
|
private |
Definition at line 386 of file mpc_local_planner_ros.h.
The documentation for this class was generated from the following files: