Unit tests for point-to-plane optimization. More...
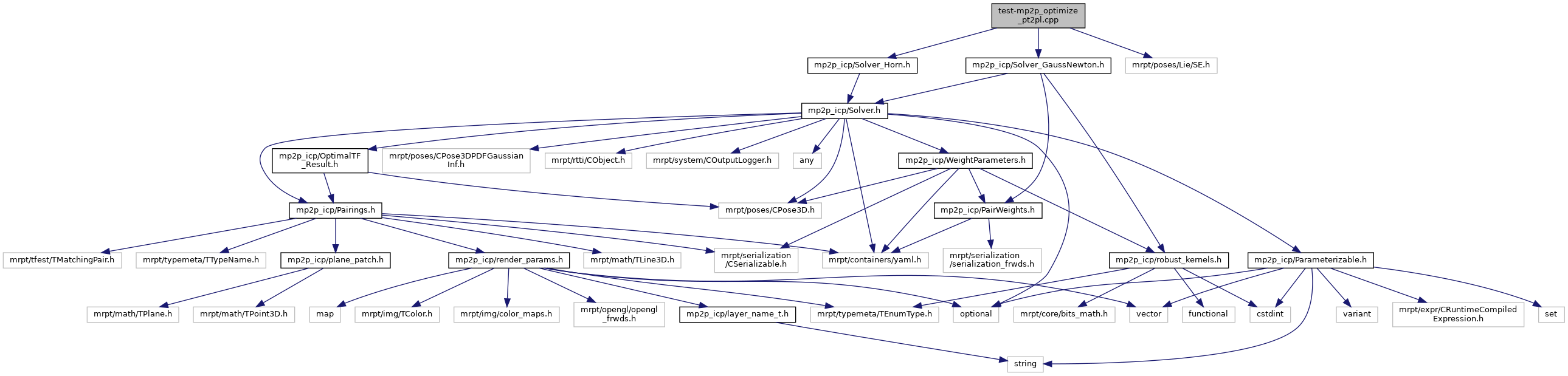
#include <mp2p_icp/Solver_GaussNewton.h>#include <mp2p_icp/Solver_Horn.h>#include <mrpt/poses/Lie/SE.h>
Include dependency graph for test-mp2p_optimize_pt2pl.cpp:
Go to the source code of this file.
Functions | |
| int | main ([[maybe_unused]] int argc, [[maybe_unused]] char **argv) |
| static void | test_mp2p_optimize_pt2pl () |
| static void | test_opt_pt2pl (const mrpt::poses::CPose3D &groundTruth, const mp2p_icp::Solver &solver) |
Detailed Description
Unit tests for point-to-plane optimization.
- Date
- Dec 4, 2021
Definition in file test-mp2p_optimize_pt2pl.cpp.
Function Documentation
◆ main()
| int main | ( | [[maybe_unused] ] int | argc, |
| [[maybe_unused] ] char ** | argv | ||
| ) |
Definition at line 124 of file test-mp2p_optimize_pt2pl.cpp.
◆ test_mp2p_optimize_pt2pl()
|
static |
Definition at line 72 of file test-mp2p_optimize_pt2pl.cpp.
◆ test_opt_pt2pl()
|
static |
Definition at line 18 of file test-mp2p_optimize_pt2pl.cpp.