OLAE algorithm to find the SE(3) optimal transformation. More...
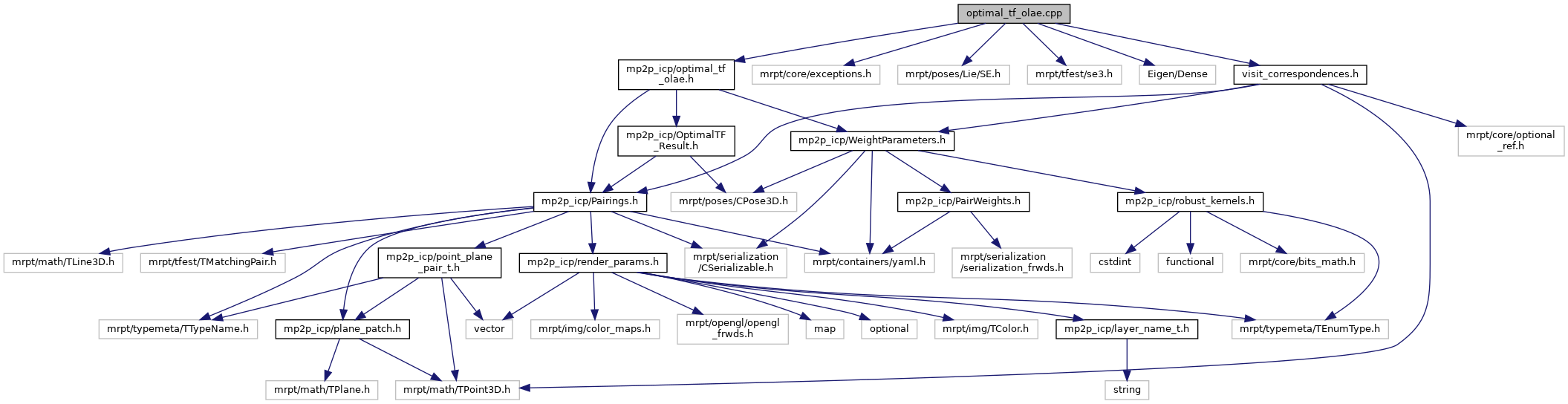
#include <mp2p_icp/optimal_tf_olae.h>#include <mrpt/core/exceptions.h>#include <mrpt/poses/Lie/SE.h>#include <mrpt/tfest/se3.h>#include <Eigen/Dense>#include "visit_correspondences.h"
Include dependency graph for optimal_tf_olae.cpp:
Go to the source code of this file.
Classes | |
| struct | OLAE_LinearSystems |
Functions | |
| static mrpt::poses::CPose3D | gibbs2pose (const Eigen::Vector3d &v) |
| static OLAE_LinearSystems | olae_build_linear_system (const Pairings &in, const WeightParameters &wp, const mrpt::math::TPoint3D &ct_local, const mrpt::math::TPoint3D &ct_global, OutlierIndices &in_out_outliers) |
Detailed Description
OLAE algorithm to find the SE(3) optimal transformation.
- Date
- Jun 16, 2019
Definition in file optimal_tf_olae.cpp.
Function Documentation
◆ gibbs2pose()
|
static |
Definition at line 25 of file optimal_tf_olae.cpp.
◆ olae_build_linear_system()
|
static |
Core of the OLAE algorithm
Definition at line 57 of file optimal_tf_olae.cpp.