#include <FilterRemoveByVoxelOccupancy.h>
Classes | |
| struct | Parameters |
Public Member Functions | |
| void | filter (mp2p_icp::metric_map_t &inOut) const override |
| FilterRemoveByVoxelOccupancy () | |
| void | initialize (const mrpt::containers::yaml &c) override |
 Public Member Functions inherited from mp2p_icp_filters::FilterBase Public Member Functions inherited from mp2p_icp_filters::FilterBase | |
| FilterBase () | |
| virtual | ~FilterBase () |
| Public Member Functions inherited from mp2p_icp::Parameterizable | |
| ParameterSource * | attachedSource () |
| const ParameterSource * | attachedSource () const |
| virtual void | attachToParameterSource (ParameterSource &source) |
| void | checkAllParametersAreRealized () const |
| auto & | declaredParameters () |
| const auto & | declaredParameters () const |
| void | unrealizeParameters () |
| Mark all non-constant parameters as non-evaluated again. More... | |
Public Attributes | |
| Parameters | params_ |
Additional Inherited Members | |
| Protected Member Functions inherited from mp2p_icp::Parameterizable | |
| void | parseAndDeclareParameter (const std::string &value, double &target) |
| void | parseAndDeclareParameter (const std::string &value, float &target) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void | parseAndDeclareParameter (const std::string &value, uint32_t &target) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
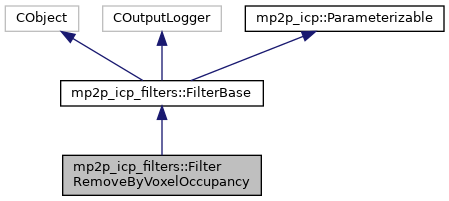
Detailed Description
Removes points from an input point cloud layer by occupancy of another input voxel layer. Can be used to remove dynamic objects. Both input layers are assumed to be in the same frame of reference.
There are two output layer (you can define one or both):
output_layer_static_objects: for those points within voxels with high occupancy ("static objects").output_layer_dynamic_objects: for those points within voxels with low occupancy ("dynamic objects").
The input layers are:
input_pointcloud_layer: The input cloud.input_voxel_layer: It must be of type mrpt::maps::CVoxelMap and contains the occupancy of each volume of the map.
Definition at line 41 of file FilterRemoveByVoxelOccupancy.h.
Constructor & Destructor Documentation
◆ FilterRemoveByVoxelOccupancy()
| FilterRemoveByVoxelOccupancy::FilterRemoveByVoxelOccupancy | ( | ) |
Definition at line 36 of file FilterRemoveByVoxelOccupancy.cpp.
Member Function Documentation
◆ filter()
|
overridevirtual |
See docs above for FilterBase.
Implements mp2p_icp_filters::FilterBase.
Definition at line 51 of file FilterRemoveByVoxelOccupancy.cpp.
◆ initialize()
|
overridevirtual |
Loads, from a YAML configuration block, all the common, and implementation-specific parameters.
Implements mp2p_icp_filters::FilterBase.
Definition at line 41 of file FilterRemoveByVoxelOccupancy.cpp.
Member Data Documentation
◆ params_
| Parameters mp2p_icp_filters::FilterRemoveByVoxelOccupancy::params_ |
Algorithm parameters
Definition at line 67 of file FilterRemoveByVoxelOccupancy.h.
The documentation for this class was generated from the following files: