#include <FilterEdgesPlanes.h>
Classes | |
| struct | Parameters |
Public Member Functions | |
| void | filter (mp2p_icp::metric_map_t &inOut) const override |
| FilterEdgesPlanes () | |
| void | initialize (const mrpt::containers::yaml &c) override |
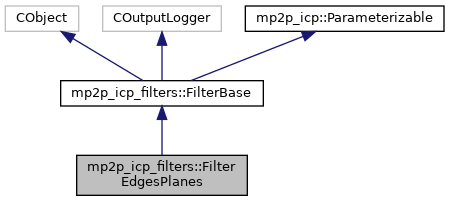
 Public Member Functions inherited from mp2p_icp_filters::FilterBase Public Member Functions inherited from mp2p_icp_filters::FilterBase | |
| FilterBase () | |
| virtual | ~FilterBase () |
| Public Member Functions inherited from mp2p_icp::Parameterizable | |
| ParameterSource * | attachedSource () |
| const ParameterSource * | attachedSource () const |
| virtual void | attachToParameterSource (ParameterSource &source) |
| void | checkAllParametersAreRealized () const |
| auto & | declaredParameters () |
| const auto & | declaredParameters () const |
| void | unrealizeParameters () |
| Mark all non-constant parameters as non-evaluated again. More... | |
Public Attributes | |
| Parameters | params_ |
Private Attributes | |
| PointCloudToVoxelGrid | filter_grid_ |
Additional Inherited Members | |
| Protected Member Functions inherited from mp2p_icp::Parameterizable | |
| void | parseAndDeclareParameter (const std::string &value, double &target) |
| void | parseAndDeclareParameter (const std::string &value, float &target) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void | parseAndDeclareParameter (const std::string &value, uint32_t &target) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
Detailed Description
Accepts as input a point cloud, and classifies points into edges and planes.
Based on the LOAM paper (Zhang, Ji, and Sanjiv Singh. "LOAM: Lidar odometry and mapping in real-time." Robotics: Science and systems. Vol. 2. No. 9. 2014.).
Not compatible with calling from different threads simultaneously for different input point clouds. Use independent instances for each thread if needed.
Definition at line 34 of file FilterEdgesPlanes.h.
Constructor & Destructor Documentation
◆ FilterEdgesPlanes()
|
default |
Member Function Documentation
◆ filter()
|
overridevirtual |
See docs above for FilterBase.
Implements mp2p_icp_filters::FilterBase.
Definition at line 52 of file FilterEdgesPlanes.cpp.
◆ initialize()
|
overridevirtual |
Loads, from a YAML configuration block, all the common, and implementation-specific parameters.
Implements mp2p_icp_filters::FilterBase.
Definition at line 40 of file FilterEdgesPlanes.cpp.
Member Data Documentation
◆ filter_grid_
|
mutableprivate |
Definition at line 70 of file FilterEdgesPlanes.h.
◆ params_
| Parameters mp2p_icp_filters::FilterEdgesPlanes::params_ |
Algorithm parameters
Definition at line 67 of file FilterEdgesPlanes.h.
The documentation for this class was generated from the following files: