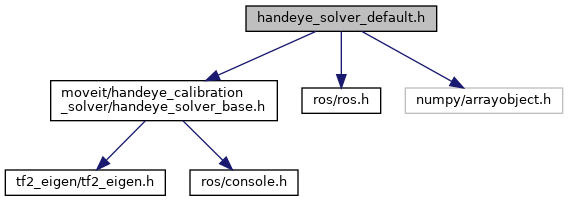
#include <moveit/handeye_calibration_solver/handeye_solver_base.h>#include <ros/ros.h>#include <numpy/arrayobject.h>
Include dependency graph for handeye_solver_default.h:
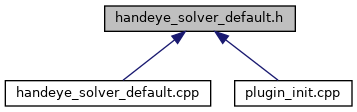
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | moveit_handeye_calibration::HandEyeSolverDefault |
Namespaces | |
| moveit_handeye_calibration | |
Macros | |
| #define | NPY_NO_DEPRECATED_API NPY_1_7_API_VERSION |
Variables | |
| constexpr auto | moveit_handeye_calibration::TRANSFORM_MATRIX_DIMENSION = 4 |
Macro Definition Documentation
◆ NPY_NO_DEPRECATED_API
| #define NPY_NO_DEPRECATED_API NPY_1_7_API_VERSION |
Definition at line 52 of file handeye_solver_default.h.