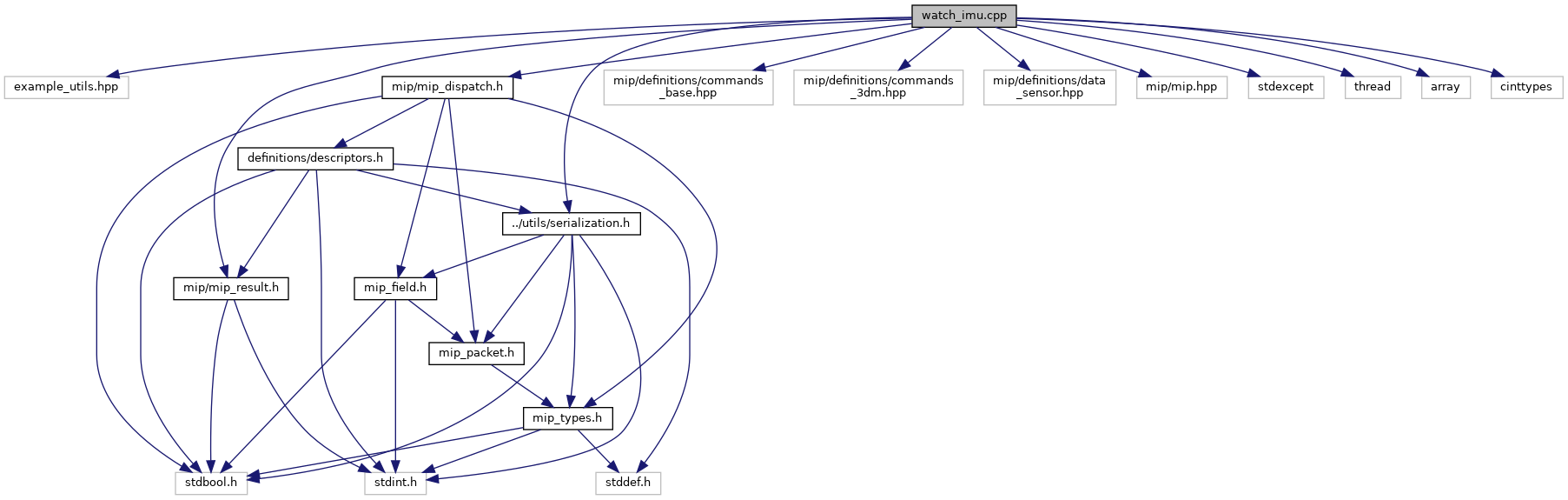
#include "example_utils.hpp"
#include <mip/mip_result.h>
#include <mip/mip_dispatch.h>
#include <mip/utils/serialization.h>
#include <mip/definitions/commands_base.hpp>
#include <mip/definitions/commands_3dm.hpp>
#include <mip/definitions/data_sensor.hpp>
#include <mip/mip.hpp>
#include <stdexcept>
#include <thread>
#include <array>
#include <cinttypes>
Go to the source code of this file.
|
| void | handleAccel (void *, const mip::Field &field, mip::Timestamp timestamp) |
| |
| void | handleGyro (void *, const mip::data_sensor::ScaledGyro &data, mip::Timestamp timestamp) |
| |
| void | handleMag (void *, const mip::data_sensor::ScaledMag &data, mip::Timestamp timestamp) |
| |
| void | handlePacket (void *, const mip::PacketRef &packet, mip::Timestamp timestamp) |
| |
| int | main (int argc, const char *argv[]) |
| |
| int | run (mip::DeviceInterface &device) |
| |
◆ __STDC_FORMAT_MACROS
| #define __STDC_FORMAT_MACROS 1 |
◆ handleAccel()
| void handleAccel |
( |
void * |
, |
|
|
const mip::Field & |
field, |
|
|
mip::Timestamp |
timestamp |
|
) |
| |
◆ handleGyro()
| void handleGyro |
( |
void * |
, |
|
|
const mip::data_sensor::ScaledGyro & |
data, |
|
|
mip::Timestamp |
timestamp |
|
) |
| |
◆ handleMag()
| void handleMag |
( |
void * |
, |
|
|
const mip::data_sensor::ScaledMag & |
data, |
|
|
mip::Timestamp |
timestamp |
|
) |
| |
◆ handlePacket()
| void handlePacket |
( |
void * |
, |
|
|
const mip::PacketRef & |
packet, |
|
|
mip::Timestamp |
timestamp |
|
) |
| |
◆ main()
| int main |
( |
int |
argc, |
|
|
const char * |
argv[] |
|
) |
| |
◆ run()
| int run |
( |
mip::DeviceInterface & |
device | ) |
|
◆ scaled_accel
| mip::data_sensor::ScaledAccel scaled_accel |