#include <jsk_footstep_msgs/Footstep.h>#include <pcl/kdtree/kdtree_flann.h>#include <pcl/filters/crop_box.h>#include <pcl/sample_consensus/method_types.h>#include <pcl/sample_consensus/model_types.h>#include <pcl/segmentation/sac_segmentation.h>#include <pcl/filters/project_inliers.h>#include <pcl/search/octree.h>#include "jsk_footstep_planner/ann_grid.h"#include "jsk_footstep_planner/util.h"#include "jsk_footstep_planner/footstep_parameters.h"
Include dependency graph for footstep_state.h:

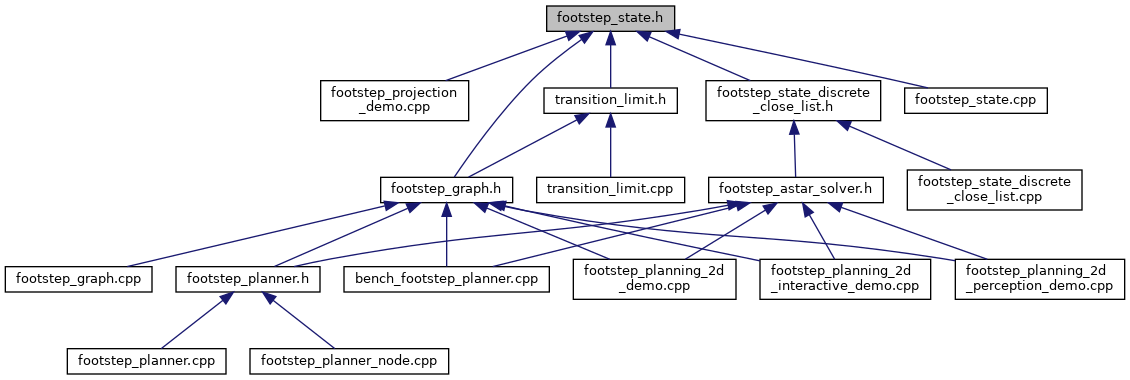
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | jsk_footstep_planner::FootstepState |
Namespaces | |
| jsk_footstep_planner | |
| jsk_footstep_planner::projection_state | |
Enumerations | |
| enum | jsk_footstep_planner::FootstepSupportState { jsk_footstep_planner::NOT_SUPPORTED, jsk_footstep_planner::SUPPORTED, jsk_footstep_planner::CLOSE_TO_SUPPORTED } |
Functions | |
| size_t | jsk_footstep_planner::hash_value (const FootstepState::Ptr &s) |
| std::string | jsk_footstep_planner::projectStateToString (unsigned int state) |
Variables | |
| const unsigned int | jsk_footstep_planner::projection_state::close_to_success = 32 |
| const unsigned int | jsk_footstep_planner::projection_state::no_enough_inliers = 16 |
| const unsigned int | jsk_footstep_planner::projection_state::no_enough_inliers_ratio = 256 |
| const unsigned int | jsk_footstep_planner::projection_state::no_enough_support = 4 |
| const unsigned int | jsk_footstep_planner::projection_state::no_plane = 8 |
| const unsigned int | jsk_footstep_planner::projection_state::no_pointcloud = 2 |
| const unsigned int | jsk_footstep_planner::projection_state::success = 1 |
| const unsigned int | jsk_footstep_planner::projection_state::transition_limit = 64 |
| const unsigned int | jsk_footstep_planner::projection_state::vertical_footstep = 128 |