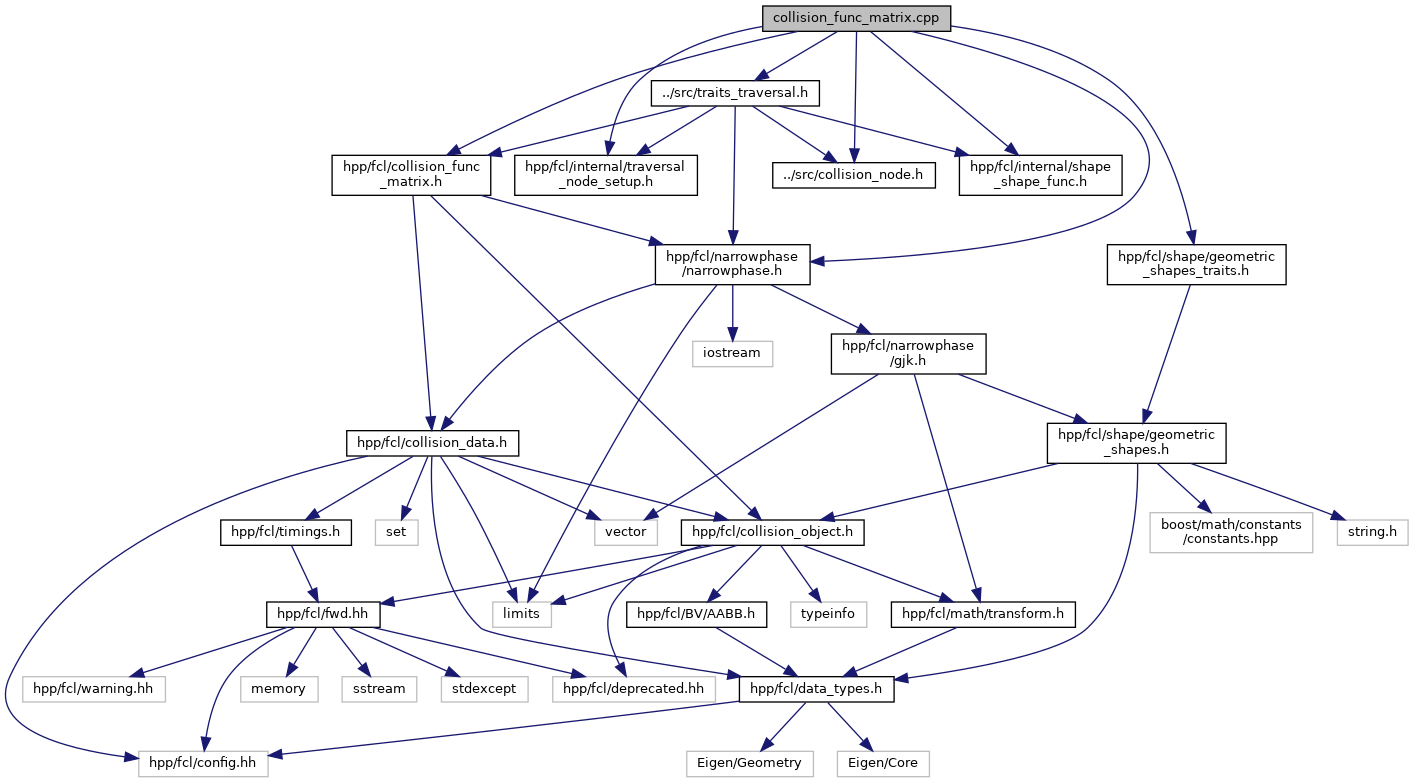
#include <hpp/fcl/collision_func_matrix.h>#include <hpp/fcl/internal/traversal_node_setup.h>#include <../src/collision_node.h>#include <hpp/fcl/narrowphase/narrowphase.h>#include <hpp/fcl/internal/shape_shape_func.h>#include <hpp/fcl/shape/geometric_shapes_traits.h>#include <../src/traits_traversal.h>
Include dependency graph for collision_func_matrix.cpp:
Go to the source code of this file.
Classes | |
| struct | hpp::fcl::details::bvh_shape_traits< T_BVH, T_SH > |
| struct | hpp::fcl::BVHShapeCollider< T_BVH, T_SH, _Options > |
| struct | hpp::fcl::HeightFieldShapeCollider< BV, Shape > |
| Collider functor for HeightField data structure. More... | |
Namespaces | |
| hpp | |
| Main namespace. | |
| hpp::fcl | |
| hpp::fcl::details | |
Macros | |
| #define | BVH_SHAPE_DEFAULT_TO_ORIENTED(bv) |
Functions | |
| hpp::fcl::details::BVH_SHAPE_DEFAULT_TO_ORIENTED (kIOS) | |
| hpp::fcl::details::BVH_SHAPE_DEFAULT_TO_ORIENTED (OBB) | |
| hpp::fcl::details::BVH_SHAPE_DEFAULT_TO_ORIENTED (OBBRSS) | |
| hpp::fcl::details::BVH_SHAPE_DEFAULT_TO_ORIENTED (RSS) | |
| template<typename T_BVH > | |
| std::size_t | hpp::fcl::BVHCollide (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const CollisionRequest &request, CollisionResult &result) |
| template<typename T_BVH > | |
| std::size_t | hpp::fcl::BVHCollide (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const GJKSolver *, const CollisionRequest &request, CollisionResult &result) |
| template<> | |
| std::size_t | hpp::fcl::BVHCollide< kIOS > (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const CollisionRequest &request, CollisionResult &result) |
| template<> | |
| std::size_t | hpp::fcl::BVHCollide< OBB > (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const CollisionRequest &request, CollisionResult &result) |
| template<> | |
| std::size_t | hpp::fcl::BVHCollide< OBBRSS > (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const CollisionRequest &request, CollisionResult &result) |
| template<typename OrientedMeshCollisionTraversalNode , typename T_BVH > | |
| std::size_t | hpp::fcl::details::orientedMeshCollide (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const CollisionRequest &request, CollisionResult &result) |
Macro Definition Documentation
◆ BVH_SHAPE_DEFAULT_TO_ORIENTED
| #define BVH_SHAPE_DEFAULT_TO_ORIENTED | ( | bv | ) |
Value:
template <typename T_SH> \
struct bvh_shape_traits<bv, T_SH> { \
enum { Options = 0 }; \
}
Definition at line 84 of file collision_func_matrix.cpp.