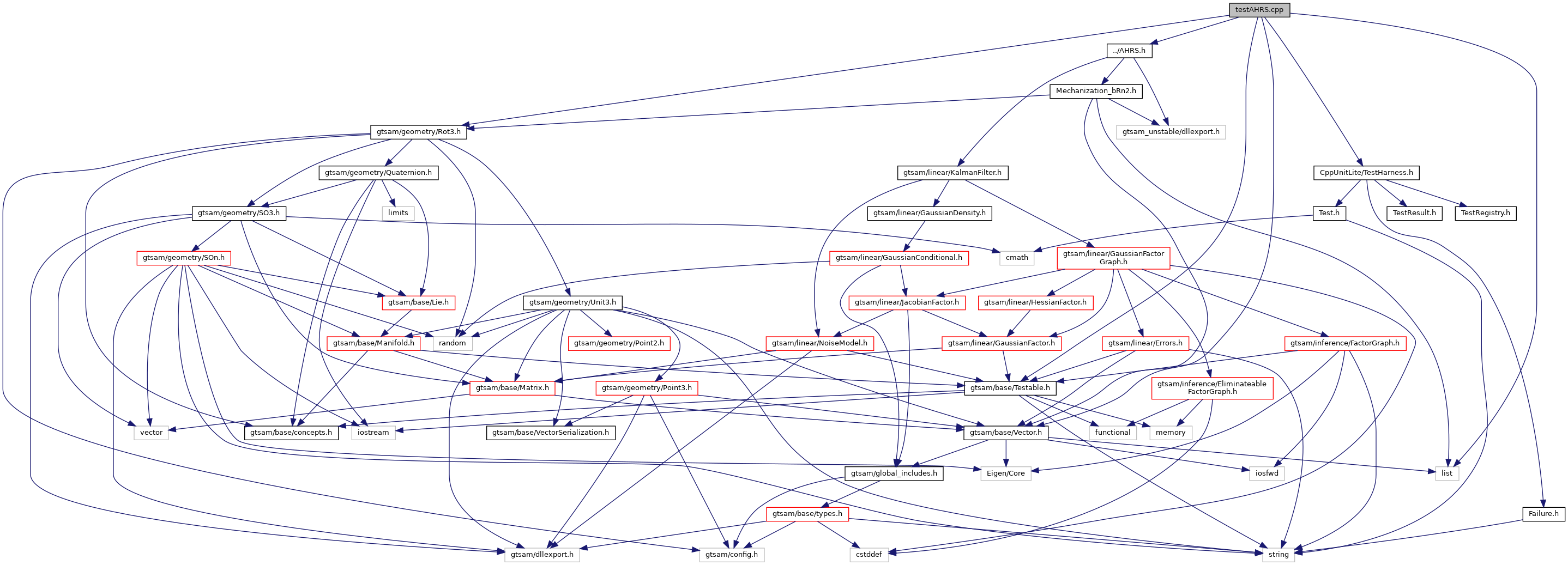
#include "../AHRS.h"#include <gtsam/geometry/Rot3.h>#include <gtsam/base/Vector.h>#include <gtsam/base/Testable.h>#include <CppUnitLite/TestHarness.h>#include <list>
Include dependency graph for testAHRS.cpp:
Go to the source code of this file.
Functions | |
| int | main () |
| TEST (AHRS, constructor) | |
| TEST (AHRS, cov) | |
| TEST (AHRS, covF) | |
| TEST (AHRS, covU) | |
| TEST (AHRS, Mechanization_integrate) | |
Variables | |
| double | g_e = 9.7963 |
| Matrix | stationaryF = trans((Matrix(3, 3) << 0.1152,-0.0188,9.7419,-0.0163,0.0146,9.7753,-0.0283,-0.0428,9.9021).finished()) |
| Matrix | stationaryU = trans((Matrix(3, 3) << -0.0004,-0.0002,-0.0014,0.0006,-0.0003,0.0007,0.0006,-0.0002,-0.0003).finished()) |
Function Documentation
◆ main()
| int main | ( | ) |
Definition at line 92 of file testAHRS.cpp.
◆ TEST() [1/5]
| TEST | ( | AHRS | , |
| constructor | |||
| ) |
Definition at line 67 of file testAHRS.cpp.
◆ TEST() [2/5]
| TEST | ( | AHRS | , |
| cov | |||
| ) |
Definition at line 24 of file testAHRS.cpp.
◆ TEST() [3/5]
| TEST | ( | AHRS | , |
| covF | |||
| ) |
Definition at line 55 of file testAHRS.cpp.
◆ TEST() [4/5]
| TEST | ( | AHRS | , |
| covU | |||
| ) |
Definition at line 43 of file testAHRS.cpp.
◆ TEST() [5/5]
| TEST | ( | AHRS | , |
| Mechanization_integrate | |||
| ) |
Definition at line 73 of file testAHRS.cpp.
Variable Documentation
◆ g_e
| double g_e = 9.7963 |
Definition at line 21 of file testAHRS.cpp.
◆ stationaryF
| Matrix stationaryF = trans((Matrix(3, 3) << 0.1152,-0.0188,9.7419,-0.0163,0.0146,9.7753,-0.0283,-0.0428,9.9021).finished()) |
Definition at line 20 of file testAHRS.cpp.
◆ stationaryU
| Matrix stationaryU = trans((Matrix(3, 3) << -0.0004,-0.0002,-0.0014,0.0006,-0.0003,0.0007,0.0006,-0.0002,-0.0003).finished()) |
Definition at line 19 of file testAHRS.cpp.