measurement functions and constraint definitions for simulated 2D robot More...
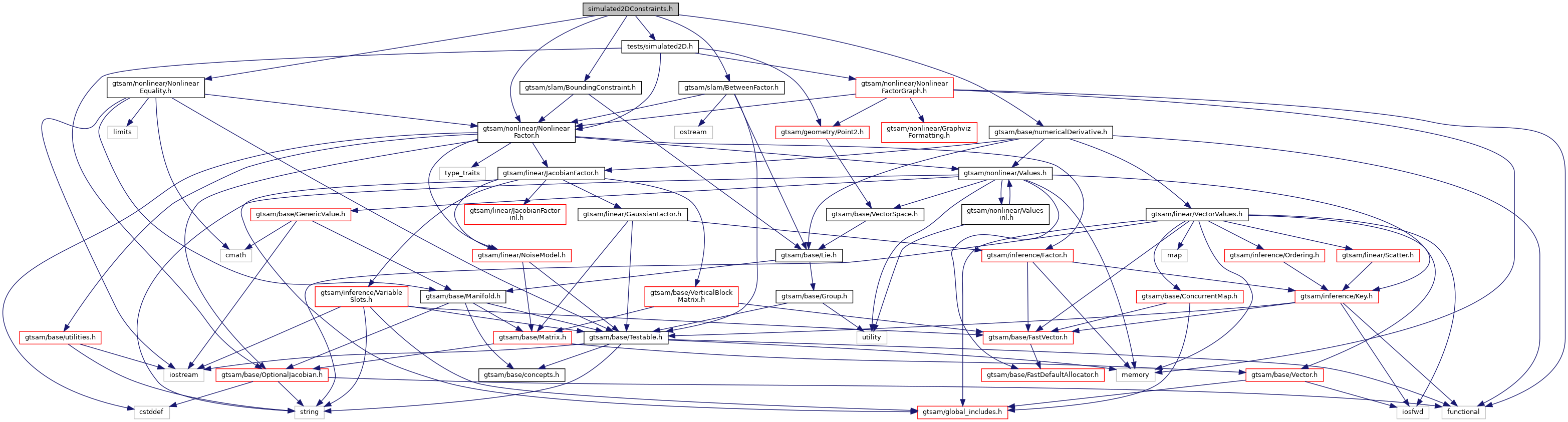
#include <gtsam/base/numericalDerivative.h>#include <gtsam/nonlinear/NonlinearEquality.h>#include <gtsam/slam/BetweenFactor.h>#include <gtsam/slam/BoundingConstraint.h>#include <tests/simulated2D.h>#include "gtsam/nonlinear/NonlinearFactor.h"
Include dependency graph for simulated2DConstraints.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| simulated2D | |
| simulated2D::equality_constraints | |
| simulated2D::inequality_constraints | |
Typedefs | |
| typedef MinDistanceConstraint< Point2, Point2 > | simulated2D::inequality_constraints::LandmarkAvoid |
| Simulated2D domain example factor. More... | |
| typedef BetweenConstraint< Point2 > | simulated2D::equality_constraints::OdoEqualityConstraint |
| typedef NonlinearEquality2< Point2 > | simulated2D::equality_constraints::PointEqualityConstraint |
| typedef NonlinearEquality2< Point2 > | simulated2D::equality_constraints::PoseEqualityConstraint |
| typedef MaxDistanceConstraint< Point2 > | simulated2D::inequality_constraints::PoseMaxDistConstraint |
| Simulated2D domain example factor. More... | |
| typedef ScalarCoordConstraint1< Point2, 0 > | simulated2D::inequality_constraints::PoseXInequality |
| Simulated2D domain example factor constraining X. More... | |
| typedef ScalarCoordConstraint1< Point2, 1 > | simulated2D::inequality_constraints::PoseYInequality |
| Simulated2D domain example factor constraining Y. More... | |
| typedef NonlinearEquality1< Point2 > | simulated2D::equality_constraints::UnaryEqualityConstraint |
| typedef NonlinearEquality1< Point2 > | simulated2D::equality_constraints::UnaryEqualityPointConstraint |
Functions | |
| template<class T1 , class T2 > | |
| double | simulated2D::inequality_constraints::range_trait (const T1 &a, const T2 &b) |
Detailed Description
measurement functions and constraint definitions for simulated 2D robot
Definition in file simulated2DConstraints.h.