Graph algorithm using boost library. More...
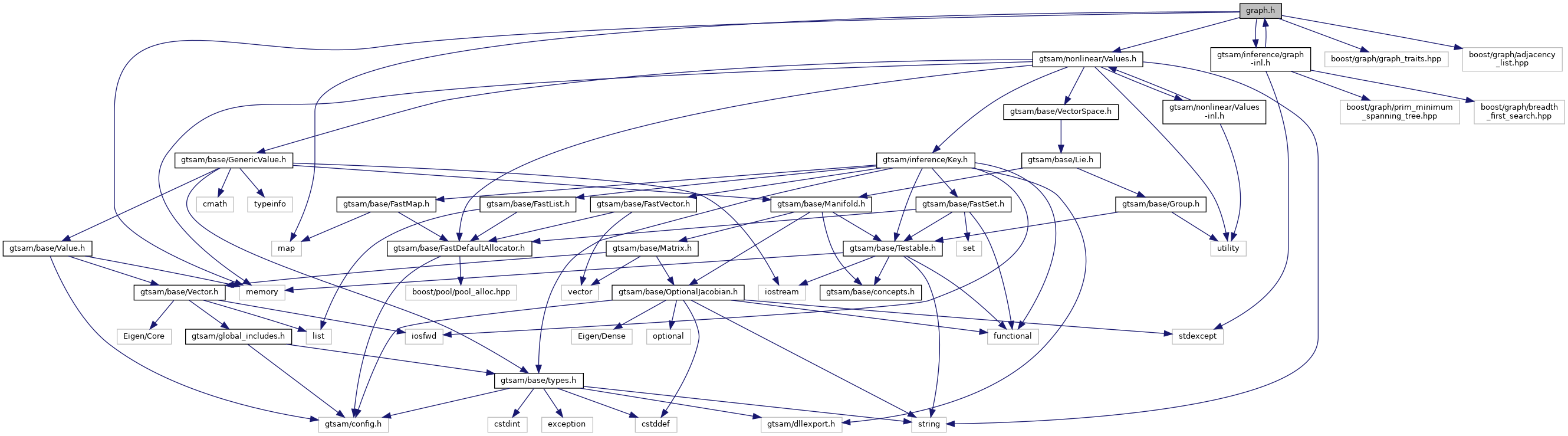
#include <map>#include <boost/graph/graph_traits.hpp>#include <boost/graph/adjacency_list.hpp>#include <memory>#include <gtsam/nonlinear/Values.h>#include <gtsam/inference/graph-inl.h>
Include dependency graph for graph.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gtsam::PredecessorMap< KEY > |
| class | gtsam::SDGraph< KEY > |
| class | gtsam::SGraph< KEY > |
Namespaces | |
| gtsam | |
| traits | |
Macros | |
| #define | BOOST_NO_HASH |
Functions | |
| template<class G , class Factor , class POSE , class KEY > | |
| std::shared_ptr< Values > | gtsam::composePoses (const G &graph, const PredecessorMap< KEY > &tree, const POSE &rootPose) |
| template<class G , class KEY , class FACTOR2 > | |
| PredecessorMap< KEY > | gtsam::findMinimumSpanningTree (const G &fg) |
| template<class G , class V , class KEY > | |
| std::tuple< G, V, std::map< KEY, V > > | gtsam::predecessorMap2Graph (const PredecessorMap< KEY > &p_map) |
| template<class KEY > | |
| std::list< KEY > | gtsam::predecessorMap2Keys (const PredecessorMap< KEY > &p_map) |
| template<class G , class KEY , class FACTOR2 > | |
| void | gtsam::split (const G &g, const PredecessorMap< KEY > &tree, G &Ab1, G &Ab2) |
| template<class G , class F , class KEY > | |
| SDGraph< KEY > | gtsam::toBoostGraph (const G &graph) |