Base class to create smart factors on poses or cameras. More...
#include <gtsam/slam/JacobianFactorQ.h>#include <gtsam/slam/JacobianFactorSVD.h>#include <gtsam/slam/RegularImplicitSchurFactor.h>#include <gtsam/nonlinear/NonlinearFactor.h>#include <gtsam/linear/RegularHessianFactor.h>#include <gtsam/geometry/CameraSet.h>#include <optional>#include <vector>
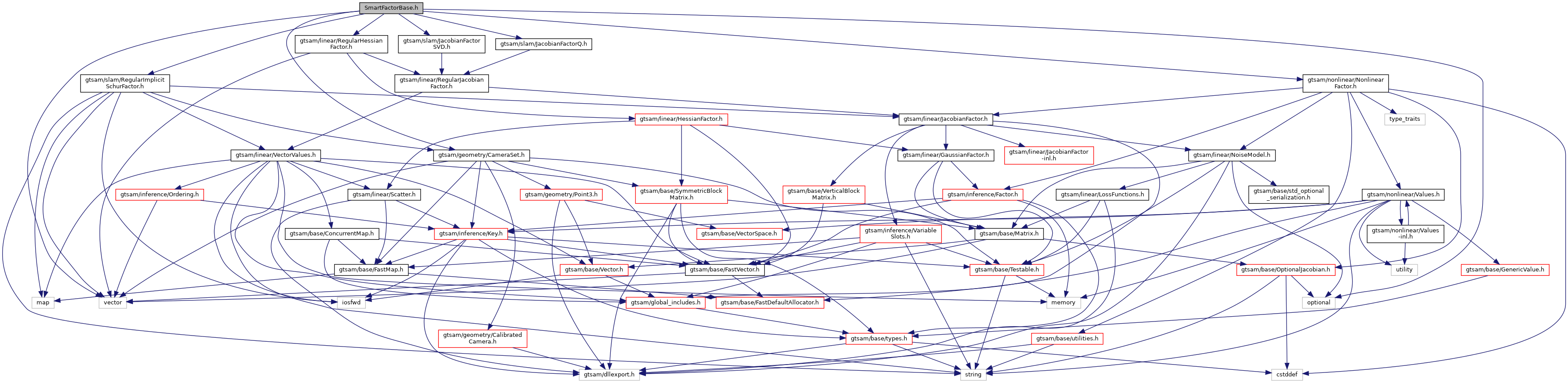
Include dependency graph for SmartFactorBase.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | gtsam::SmartFactorBase< CAMERA > |
| Base class for smart factors. This base class has no internal point, but it has a measurement, noise model and an optional sensor pose. This class mainly computes the derivatives and returns them as a variety of factors. The methods take a CameraSet<CAMERA> argument and the value of a point, which is kept in the derived class. More... | |
Namespaces | |
| gtsam | |
| traits | |
Detailed Description
Base class to create smart factors on poses or cameras.
Definition in file SmartFactorBase.h.