N*N matrix representation of SO(N). N can be Eigen::Dynamic. More...
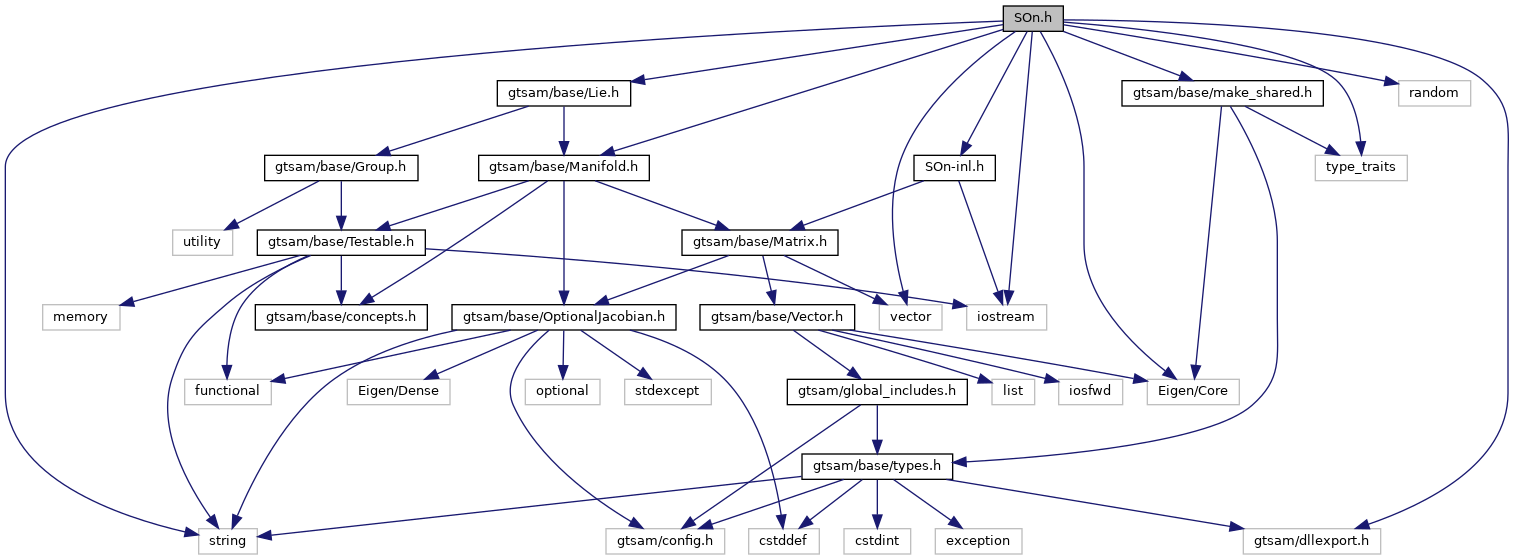
#include <gtsam/base/Lie.h>#include <gtsam/base/Manifold.h>#include <gtsam/base/make_shared.h>#include <gtsam/dllexport.h>#include <Eigen/Core>#include <iostream>#include <string>#include <type_traits>#include <vector>#include <random>#include <cassert>#include "SOn-inl.h"
Include dependency graph for SOn.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | gtsam::SO< N >::ChartAtOrigin |
| class | gtsam::SO< N > |
| struct | gtsam::traits< const SO< N > > |
| struct | gtsam::traits< SO< N > > |
Namespaces | |
| gtsam | |
| traits | |
| gtsam::internal | |
Typedefs | |
| using | gtsam::DynamicJacobian = OptionalJacobian< Eigen::Dynamic, Eigen::Dynamic > |
| using | gtsam::SOn = SO< Eigen::Dynamic > |
Functions | |
| constexpr int | gtsam::internal::DimensionSO (int N) |
| Calculate dimensionality of SO<N> manifold, or return Dynamic if so. More... | |
| constexpr int | gtsam::internal::NSquaredSO (int N) |
Detailed Description
N*N matrix representation of SO(N). N can be Eigen::Dynamic.
- Date
- March 2019
Definition in file SOn.h.