Simple example for the structure-from-motion problems. More...
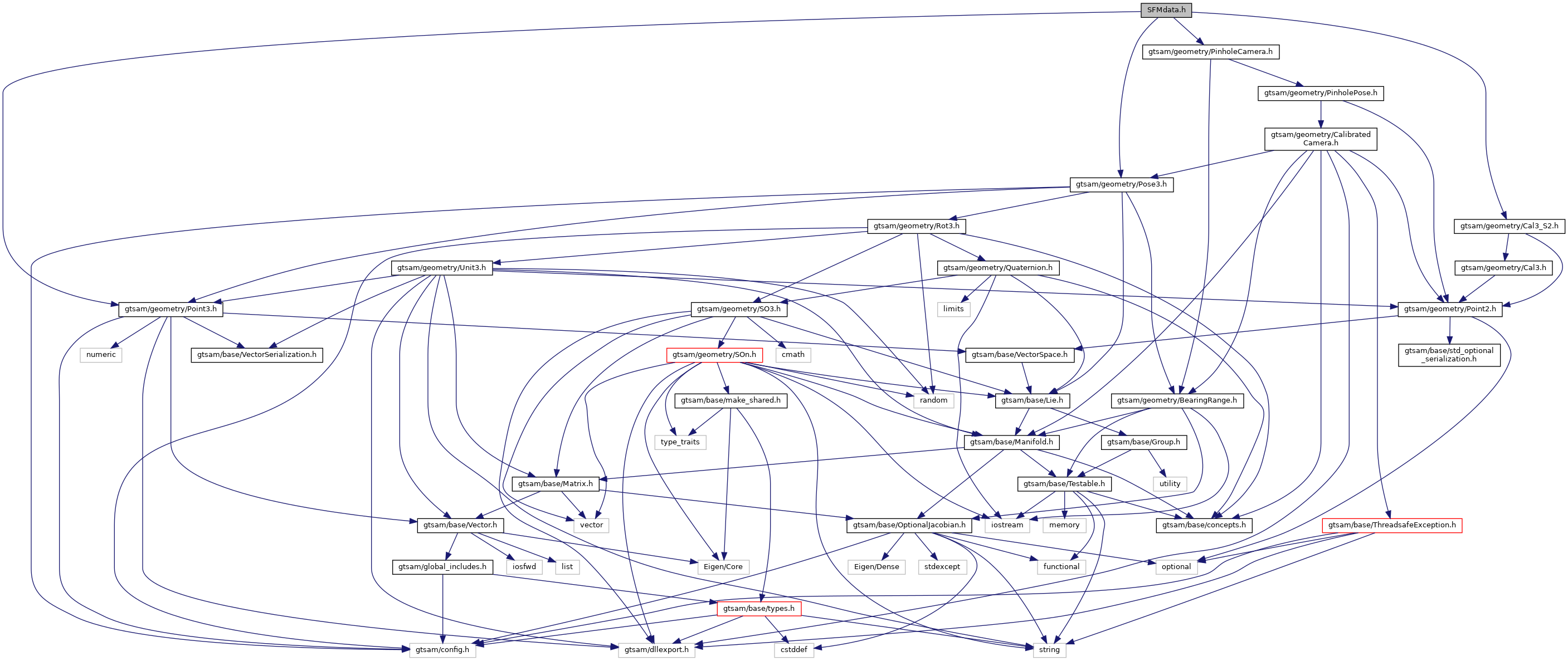
#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/Pose3.h>#include <gtsam/geometry/Cal3_S2.h>#include <gtsam/geometry/PinholeCamera.h>
Include dependency graph for SFMdata.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
Functions | |
| std::vector< Point3 > | gtsam::createPoints () |
| Create a set of ground-truth landmarks. More... | |
| std::vector< Pose3 > | gtsam::createPoses (const Pose3 &init=Pose3(Rot3::Ypr(M_PI_2, 0, -M_PI_2), {30, 0, 0}), const Pose3 &delta=Pose3(Rot3::Ypr(0, -M_PI_4, 0), {sin(M_PI_4) *30, 0, 30 *(1 - sin(M_PI_4))}), int steps=8) |
| std::vector< Pose3 > | gtsam::posesOnCircle (int num_cameras=8, double R=30) |
Detailed Description
Simple example for the structure-from-motion problems.
Definition in file SFMdata.h.