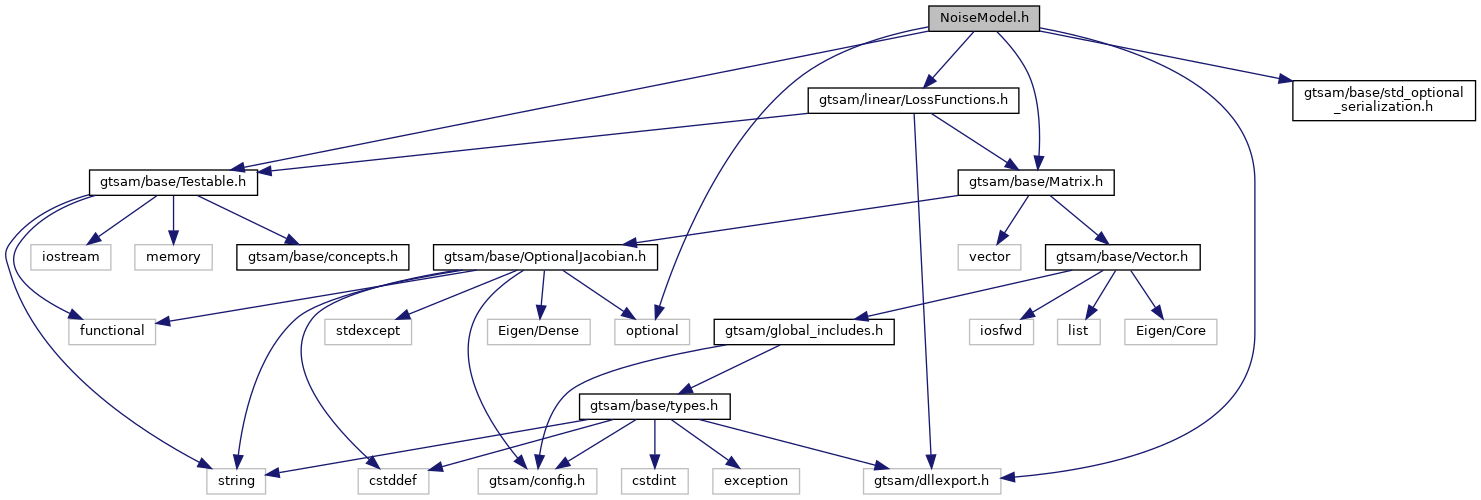
#include <gtsam/base/Testable.h>#include <gtsam/base/Matrix.h>#include <gtsam/base/std_optional_serialization.h>#include <gtsam/dllexport.h>#include <gtsam/linear/LossFunctions.h>#include <optional>
Include dependency graph for NoiseModel.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | gtsam::noiseModel::Base |
| class | gtsam::noiseModel::Constrained |
| class | gtsam::noiseModel::Diagonal |
| class | gtsam::noiseModel::Gaussian |
| class | gtsam::noiseModel::Isotropic |
| class | gtsam::noiseModel::Robust |
| struct | gtsam::traits< noiseModel::Constrained > |
| struct | gtsam::traits< noiseModel::Diagonal > |
| struct | gtsam::traits< noiseModel::Gaussian > |
| traits More... | |
| struct | gtsam::traits< noiseModel::Isotropic > |
| struct | gtsam::traits< noiseModel::Unit > |
| class | gtsam::noiseModel::Unit |
Namespaces | |
| gtsam | |
| traits | |
| gtsam::noiseModel | |
| All noise models live in the noiseModel namespace. | |
Typedefs | |
| typedef noiseModel::Constrained::shared_ptr | gtsam::SharedConstrained |
| typedef noiseModel::Diagonal::shared_ptr | gtsam::SharedDiagonal |
| typedef noiseModel::Gaussian::shared_ptr | gtsam::SharedGaussian |
| typedef noiseModel::Isotropic::shared_ptr | gtsam::SharedIsotropic |
| typedef noiseModel::Base::shared_ptr | gtsam::SharedNoiseModel |
Functions | |
| std::optional< Vector > | gtsam::noiseModel::checkIfDiagonal (const Matrix &M) |