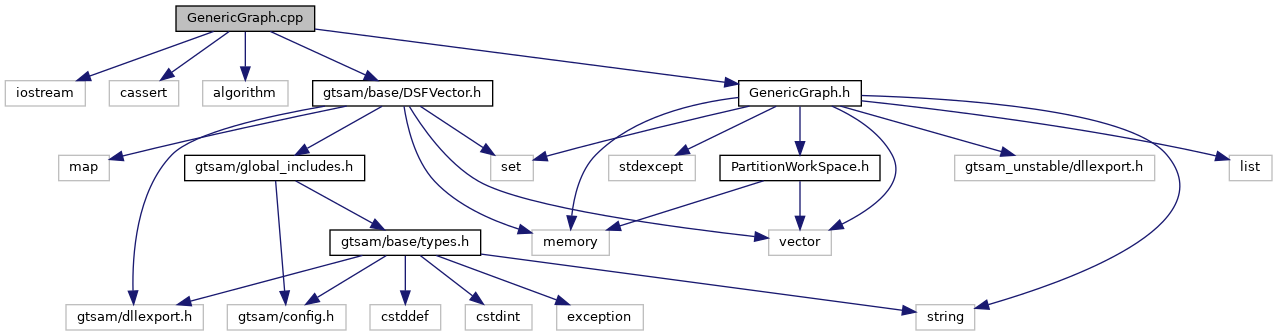
#include <iostream>#include <cassert>#include <algorithm>#include <gtsam/base/DSFVector.h>#include "GenericGraph.h"
Include dependency graph for GenericGraph.cpp:
Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
| gtsam::partition | |
Functions | |
| void | gtsam::partition::checkSingularity (const GenericGraph3D &graph, const std::vector< size_t > &frontals, WorkSpace &workspace, const size_t minNrConstraintsPerCamera, const size_t minNrConstraintsPerLandmark) |
| DSFVector | gtsam::partition::createDSF (const GenericGraph3D &graph, const vector< size_t > &keys, const WorkSpace &workspace) |
| list< vector< size_t > > | gtsam::partition::findIslands (const GenericGraph2D &graph, const vector< size_t > &keys, WorkSpace &workspace, const int minNrConstraintsPerCamera, const int minNrConstraintsPerLandmark) |
| list< vector< size_t > > | gtsam::partition::findIslands (const GenericGraph3D &graph, const vector< size_t > &keys, WorkSpace &workspace, const size_t minNrConstraintsPerCamera, const size_t minNrConstraintsPerLandmark) |
| void | gtsam::partition::findSingularCamerasLandmarks (const GenericGraph3D &graph, const WorkSpace &workspace, const vector< bool > &isCamera, const vector< bool > &isLandmark, set< size_t > &singularCameras, set< size_t > &singularLandmarks, vector< int > &nrConstraints, bool &foundSingularCamera, bool &foundSingularLandmark, const int minNrConstraintsPerCamera, const int minNrConstraintsPerLandmark) |
| int | gtsam::partition::getNrCommonLandmarks (const vector< size_t > &landmarks1, const vector< size_t > &landmarks2) |
| bool | gtsam::partition::isSingular (const set< size_t > &singularCameras, const set< size_t > &singularLandmarks, const GenericNode3D &node) |
| void | gtsam::partition::print (const GenericGraph2D &graph, const std::string name) |
| void | gtsam::partition::print (const GenericGraph3D &graph, const std::string name) |
| void | gtsam::partition::reduceGenericGraph (const GenericGraph3D &graph, const std::vector< size_t > &cameraKeys, const std::vector< size_t > &landmarkKeys, const std::vector< int > &dictionary, GenericGraph3D &reducedGraph) |