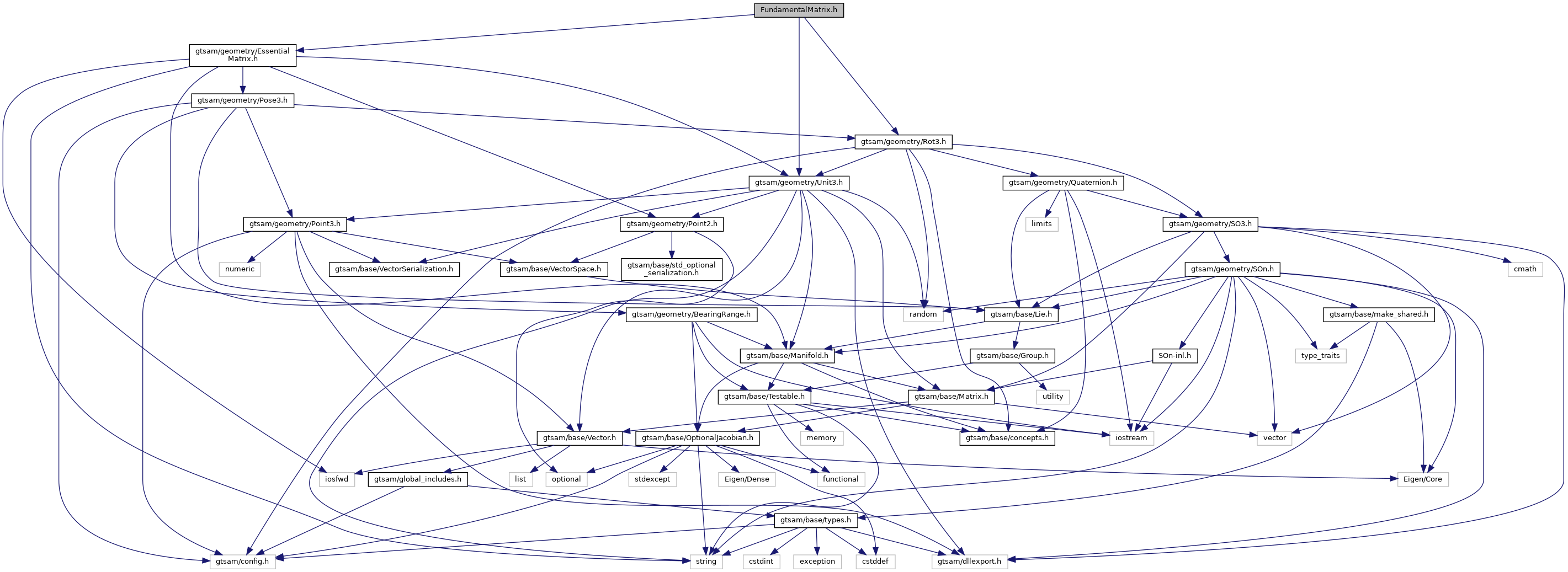
#include <gtsam/base/OptionalJacobian.h>#include <gtsam/geometry/EssentialMatrix.h>#include <gtsam/geometry/Rot3.h>#include <gtsam/geometry/Unit3.h>
Include dependency graph for FundamentalMatrix.h:
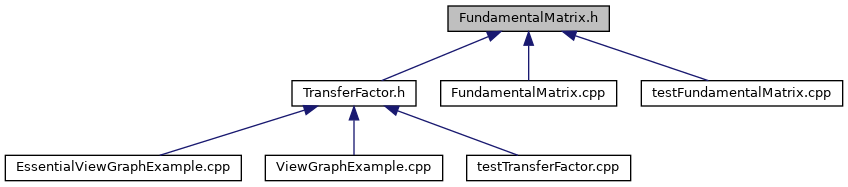
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gtsam::FundamentalMatrix |
| Represents a fundamental matrix in computer vision, which encodes the epipolar geometry between two views. More... | |
| class | gtsam::SimpleFundamentalMatrix |
| Class for representing a simple fundamental matrix. More... | |
| struct | gtsam::traits< FundamentalMatrix > |
| struct | gtsam::traits< SimpleFundamentalMatrix > |
| struct | gtsam::TripleF< F > |
Namespaces | |
| gtsam | |
| traits | |
Functions | |
| Point2 | gtsam::EpipolarTransfer (const Matrix3 &Fca, const Point2 &pa, const Matrix3 &Fcb, const Point2 &pb) |
| Transfer projections from cameras a and b to camera c. More... | |