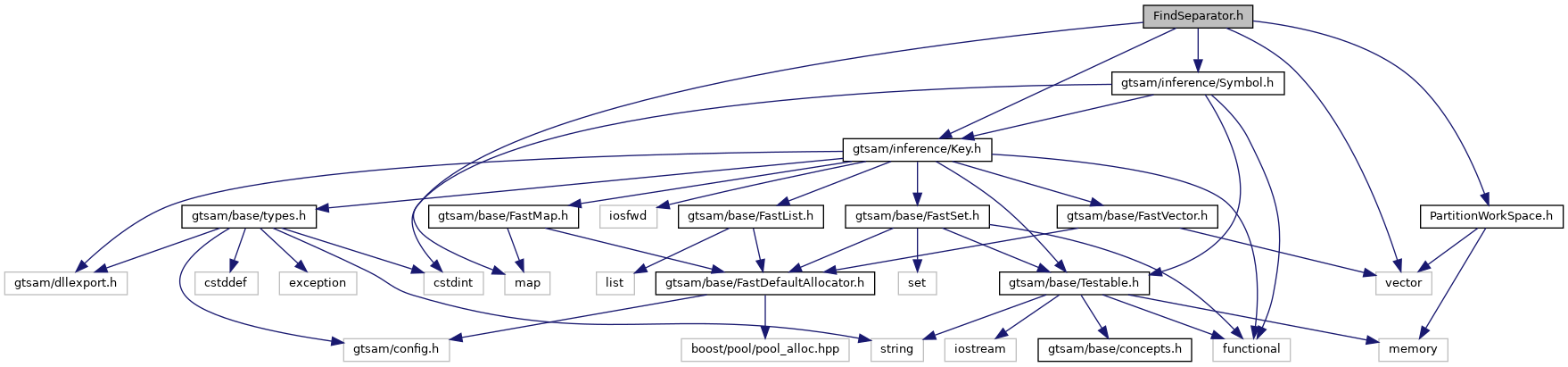
#include <map>#include <vector>#include <gtsam/inference/Key.h>#include <gtsam/inference/Symbol.h>#include "PartitionWorkSpace.h"
Include dependency graph for FindSeparator.h:
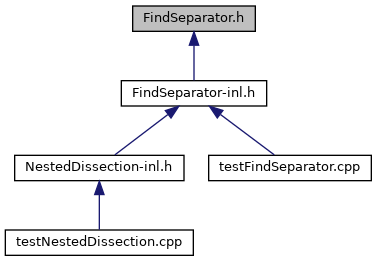
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | gtsam::partition::MetisResult |
Namespaces | |
| gtsam | |
| traits | |
| gtsam::partition | |
Functions | |
| template<class GenericGraph > | |
| int | gtsam::partition::findSeparator (const GenericGraph &graph, const std::vector< size_t > &keys, const int minNodesPerMap, WorkSpace &workspace, bool verbose, const std::optional< std::vector< Symbol > > &int2symbol, const bool reduceGraph, const int minNrConstraintsPerCamera, const int minNrConstraintsPerLandmark) |
| template<class GenericGraph > | |
| std::optional< MetisResult > | gtsam::partition::separatorPartitionByMetis (const GenericGraph &graph, const std::vector< size_t > &keys, WorkSpace &workspace, bool verbose) |