#include "ensenso_camera/calibration_pattern.h"#include "ensenso_camera/image_utilities.h"#include "ensenso_camera/nxlib_version.h"#include "ensenso_camera/point_cloud_utilities.h"#include "ensenso_camera/queued_action_server.h"#include "ensenso_camera/string_helper.h"#include "ensenso_camera/virtual_object_handler.h"#include "ensenso_camera/ros2/action_server.h"#include "ensenso_camera/ros2/core.h"#include "ensenso_camera/ros2/logging.h"#include "ensenso_camera/ros2/namespace.h"#include "ensenso_camera/ros2/node_handle.h"#include "ensenso_camera/ros2/time.h"#include "ensenso_camera/ros2/image_transport.h"#include "ensenso_camera/ros2/diagnostic_msgs/diagnostic_array.h"#include "ensenso_camera/ros2/ensenso_msgs/access_tree.h"#include "ensenso_camera/ros2/ensenso_msgs/execute_command.h"#include "ensenso_camera/ros2/ensenso_msgs/get_parameter.h"#include "ensenso_camera/ros2/ensenso_msgs/parameter.h"#include "ensenso_camera/ros2/ensenso_msgs/set_parameter.h"#include "ensenso_camera/ros2/geometry_msgs/pose_stamped.h"#include "ensenso_camera/ros2/geometry_msgs/transform_stamped.h"#include "ensenso_camera/ros2/sensor_msgs/camera_info.h"#include <tf2/LinearMath/Transform.h>#include <tf2_ros/buffer.h>#include <tf2_ros/transform_broadcaster.h>#include <tf2_ros/transform_listener.h>#include <fstream>#include <map>#include <memory>#include <mutex>#include <string>#include <vector>#include "nxLib.h"
Include dependency graph for camera.h:

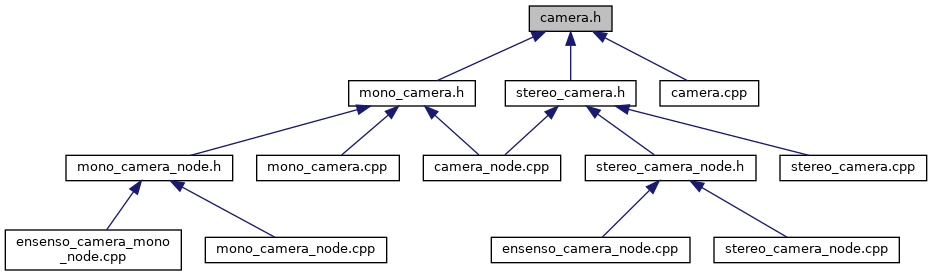
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Camera |
| struct | CameraParameters |
| struct | ParameterSet |
Macros | |
| #define | FINISH_NXLIB_ACTION(ACTION_NAME) |
| #define | LOG_NXLIB_EXCEPTION(EXCEPTION) |
| #define | PREEMPT_ACTION_IF_REQUESTED |
| #define | START_NXLIB_ACTION(ACTION_NAME, ACTION_SERVER) |
Variables | |
| const std::string | DEFAULT_PARAMETER_SET = "default" |
| const int | ERROR_CODE_TF = 101 |
| const int | ERROR_CODE_UNKNOWN_EXCEPTION = 100 |
| const double | POSE_TF_INTERVAL = 1 |
| const double | STATUS_INTERVAL = 3.0 |
| const std::string | TARGET_FRAME_LINK = "Workspace" |
| const double | TF_REQUEST_TIMEOUT = 10. |
Macro Definition Documentation
◆ FINISH_NXLIB_ACTION
| #define FINISH_NXLIB_ACTION | ( | ACTION_NAME | ) |
Value:
} /* NOLINT */ \
catch (NxLibException & e) \
{ \
ENSENSO_ERROR(nh, "NxLibException %d (%s) for item %s", e.getErrorCode(), e.getErrorText().c_str(), \
e.getItemPath().c_str()); \
LOG_NXLIB_EXCEPTION(e) \
ensenso::action::ACTION_NAME##Result result; \
result.error.code = e.getErrorCode(); \
result.error.message = e.getErrorText(); \
server->setAborted(std::move(result)); \
return; \
} /* NOLINT */ \
catch (tf2::TransformException & e) \
{ \
ENSENSO_ERROR(nh, "tf Exception: %s", e.what()); \
ensenso::action::ACTION_NAME##Result result; \
result.error.code = ERROR_CODE_TF; \
result.error.message = e.what(); \
server->setAborted(std::move(result)); \
return; \
} /* NOLINT */ \
catch (std::exception & e) \
{ \
ENSENSO_ERROR(nh, "Unknown Exception: %s", e.what()); \
ensenso::action::ACTION_NAME##Result result; \
result.error.code = ERROR_CODE_UNKNOWN_EXCEPTION; \
result.error.message = e.what(); \
server->setAborted(std::move(result)); \
return; \
}
◆ LOG_NXLIB_EXCEPTION
| #define LOG_NXLIB_EXCEPTION | ( | EXCEPTION | ) |
Value:
try \
{ \
if (EXCEPTION.getErrorCode() == NxLibExecutionFailed) \
{ \
NxLibItem executionNode(EXCEPTION.getItemPath()); \
ENSENSO_ERROR(nh, "%s: %s", executionNode[itmResult][itmErrorSymbol].asString().c_str(), \
executionNode[itmResult][itmErrorText].asString().c_str()); \
} /* NOLINT */ \
} /* NOLINT */ \
catch (...) \
{ \
} /* NOLINT */ \
ENSENSO_DEBUG(nh, "Current NxLib tree: %s", NxLibItem().asJson(true).c_str());
◆ PREEMPT_ACTION_IF_REQUESTED
| #define PREEMPT_ACTION_IF_REQUESTED |
◆ START_NXLIB_ACTION
| #define START_NXLIB_ACTION | ( | ACTION_NAME, | |
| ACTION_SERVER | |||
| ) |
Value:
auto& server = ACTION_SERVER; \
if (server->isPreemptRequested()) \
{ \
server->setPreempted(); \
return; \
} /* NOLINT */ \
std::lock_guard<std::mutex> lock(nxLibMutex); \
try \
{
Variable Documentation
◆ DEFAULT_PARAMETER_SET
| const std::string DEFAULT_PARAMETER_SET = "default" |
◆ ERROR_CODE_TF
◆ ERROR_CODE_UNKNOWN_EXCEPTION
◆ POSE_TF_INTERVAL
| const double POSE_TF_INTERVAL = 1 |
◆ STATUS_INTERVAL
| const double STATUS_INTERVAL = 3.0 |
◆ TARGET_FRAME_LINK
| const std::string TARGET_FRAME_LINK = "Workspace" |