A TopicDiagnostic combined with a ros::Publisher. More...
#include <publisher.h>
Public Member Functions | |
| DiagnosedPublisher (const ros::Publisher &pub, diagnostic_updater::Updater &diag, const diagnostic_updater::FrequencyStatusParam &freq, const diagnostic_updater::TimeStampStatusParam &stamp) | |
| Constructs a DiagnosedPublisher. More... | |
| ros::Publisher | getPublisher () const |
| Returns the publisher. More... | |
| virtual void | publish (const boost::shared_ptr< T > &message) |
| Collects statistics and publishes the message. More... | |
| virtual void | publish (const T &message) |
| Collects statistics and publishes the message. More... | |
| void | setPublisher (ros::Publisher pub) |
| Changes the publisher. More... | |
| virtual | ~DiagnosedPublisher () |
 Public Member Functions inherited from diagnostic_updater::TopicDiagnostic Public Member Functions inherited from diagnostic_updater::TopicDiagnostic | |
| virtual void | tick () |
| virtual void | tick (const ros::Time &stamp) |
| Collects statistics and publishes the message. More... | |
| TopicDiagnostic (std::string name, diagnostic_updater::Updater &diag, const diagnostic_updater::FrequencyStatusParam &freq, const diagnostic_updater::TimeStampStatusParam &stamp) | |
| Constructs a TopicDiagnostic. More... | |
| virtual | ~TopicDiagnostic () |
| Public Member Functions inherited from diagnostic_updater::HeaderlessTopicDiagnostic | |
| virtual void | clear_window () |
| Clears the frequency statistics. More... | |
| HeaderlessTopicDiagnostic (std::string name, diagnostic_updater::Updater &diag, const diagnostic_updater::FrequencyStatusParam &freq) | |
| Constructs a HeaderlessTopicDiagnostic. More... | |
| virtual | ~HeaderlessTopicDiagnostic () |
| Public Member Functions inherited from diagnostic_updater::CompositeDiagnosticTask | |
| void | addTask (DiagnosticTask *t) |
| Adds a child CompositeDiagnosticTask. More... | |
| CompositeDiagnosticTask (const std::string name) | |
| Constructs a CompositeDiagnosticTask with the given name. More... | |
| virtual void | run (DiagnosticStatusWrapper &stat) |
| Runs each child and merges their outputs. More... | |
| Public Member Functions inherited from diagnostic_updater::DiagnosticTask | |
| DiagnosticTask (const std::string name) | |
| Constructs a DiagnosticTask setting its name in the process. More... | |
| const std::string & | getName () |
| Returns the name of the DiagnosticTask. More... | |
| virtual | ~DiagnosticTask () |
Private Attributes | |
| ros::Publisher | publisher_ |
Detailed Description
template<class T>
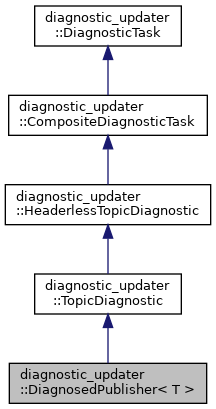
class diagnostic_updater::DiagnosedPublisher< T >
A TopicDiagnostic combined with a ros::Publisher.
For a standard ros::Publisher, this class allows the ros::Publisher and the TopicDiagnostic to be combined for added convenience.
Definition at line 206 of file publisher.h.
Constructor & Destructor Documentation
◆ DiagnosedPublisher()
|
inline |
Constructs a DiagnosedPublisher.
- Parameters
-
pub The publisher on which statistics are being collected. diag The diagnostic_updater that the CompositeDiagnosticTask should add itself to. freq The parameters for the FrequencyStatus class that will be computing statistics. stamp The parameters for the TimeStampStatus class that will be computing statistics.
Definition at line 224 of file publisher.h.
◆ ~DiagnosedPublisher()
|
inlinevirtual |
Definition at line 232 of file publisher.h.
Member Function Documentation
◆ getPublisher()
|
inline |
Returns the publisher.
Definition at line 256 of file publisher.h.
◆ publish() [1/2]
|
inlinevirtual |
Collects statistics and publishes the message.
The timestamp to be used by the TimeStampStatus class will be extracted from message.header.stamp.
Definition at line 241 of file publisher.h.
◆ publish() [2/2]
|
inlinevirtual |
Collects statistics and publishes the message.
The timestamp to be used by the TimeStampStatus class will be extracted from message.header.stamp.
Definition at line 250 of file publisher.h.
◆ setPublisher()
|
inline |
Changes the publisher.
Definition at line 264 of file publisher.h.
Member Data Documentation
◆ publisher_
|
private |
Definition at line 270 of file publisher.h.
The documentation for this class was generated from the following file: