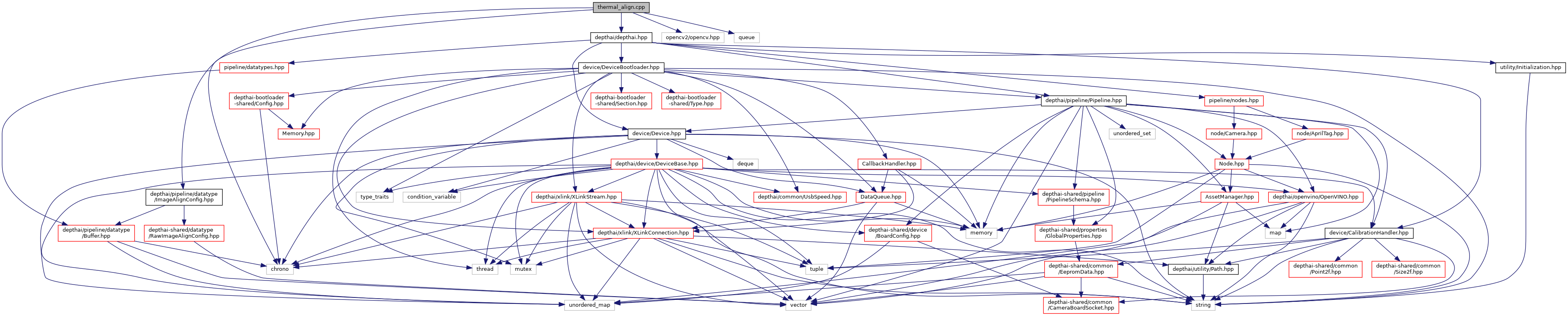
#include <chrono>#include <opencv2/opencv.hpp>#include <queue>#include "depthai/depthai.hpp"#include "depthai/pipeline/datatype/ImageAlignConfig.hpp"
Include dependency graph for thermal_align.cpp:
Go to the source code of this file.
Classes | |
| class | FPSCounter |
Functions | |
| cv::Mat | createNaNMask (const cv::Mat &frame) |
| int | main () |
| void | updateBlendWeights (int percentRgb, void *) |
| void | updateDepthPlane (int depth, void *) |
Variables | |
| constexpr auto | COLOR_RESOLUTION = dai::ColorCameraProperties::SensorResolution::THE_1080_P |
| constexpr auto | FPS = 25.0 |
| constexpr auto | RGB_SOCKET = dai::CameraBoardSocket::CAM_A |
| double | rgbWeight = 0.4 |
| int | staticDepthPlane = 0 |
| double | thermalWeight = 0.6 |
Function Documentation
◆ createNaNMask()
| cv::Mat createNaNMask | ( | const cv::Mat & | frame | ) |
Definition at line 45 of file thermal_align.cpp.
◆ main()
| int main | ( | ) |
Definition at line 57 of file thermal_align.cpp.
◆ updateBlendWeights()
| void updateBlendWeights | ( | int | percentRgb, |
| void * | |||
| ) |
Definition at line 36 of file thermal_align.cpp.
◆ updateDepthPlane()
| void updateDepthPlane | ( | int | depth, |
| void * | |||
| ) |
Definition at line 41 of file thermal_align.cpp.
Variable Documentation
◆ COLOR_RESOLUTION
|
constexpr |
Definition at line 10 of file thermal_align.cpp.
◆ FPS
|
constexpr |
Definition at line 8 of file thermal_align.cpp.
◆ RGB_SOCKET
|
constexpr |
Definition at line 9 of file thermal_align.cpp.
◆ rgbWeight
| double rgbWeight = 0.4 |
Definition at line 32 of file thermal_align.cpp.
◆ staticDepthPlane
| int staticDepthPlane = 0 |
Definition at line 34 of file thermal_align.cpp.
◆ thermalWeight
| double thermalWeight = 0.6 |
Definition at line 33 of file thermal_align.cpp.