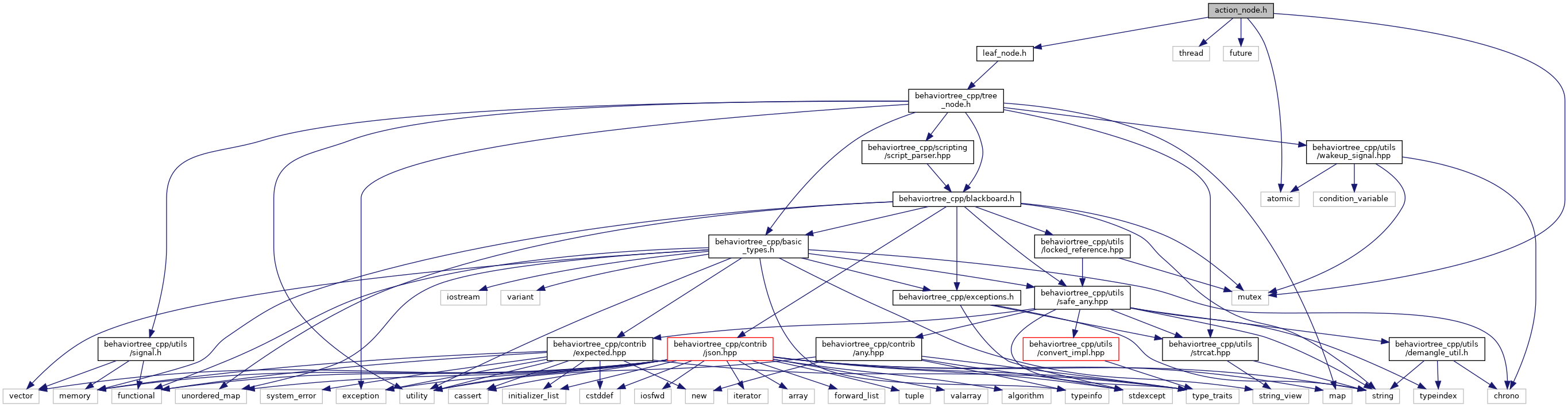
Include dependency graph for action_node.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | BT::ActionNodeBase |
| The ActionNodeBase is the base class to use to create any kind of action. A particular derived class is free to override executeTick() as needed. More... | |
| class | BT::CoroActionNode |
| The CoroActionNode class is an a good candidate for asynchronous actions which need to communicate with an external service using an async request/reply interface. More... | |
| class | BT::SimpleActionNode |
| The SimpleActionNode provides an easy to use SyncActionNode. The user should simply provide a callback with this signature. More... | |
| class | BT::StatefulActionNode |
| The StatefulActionNode is the preferred way to implement asynchronous Actions. It is actually easier to use correctly, when compared with ThreadedAction. More... | |
| class | BT::SyncActionNode |
| The SyncActionNode is an ActionNode that explicitly prevents the status RUNNING and doesn't require an implementation of halt(). More... | |
| class | BT::ThreadedAction |
| The ThreadedAction executes the tick in a different thread. More... | |
Namespaces | |
| BT | |