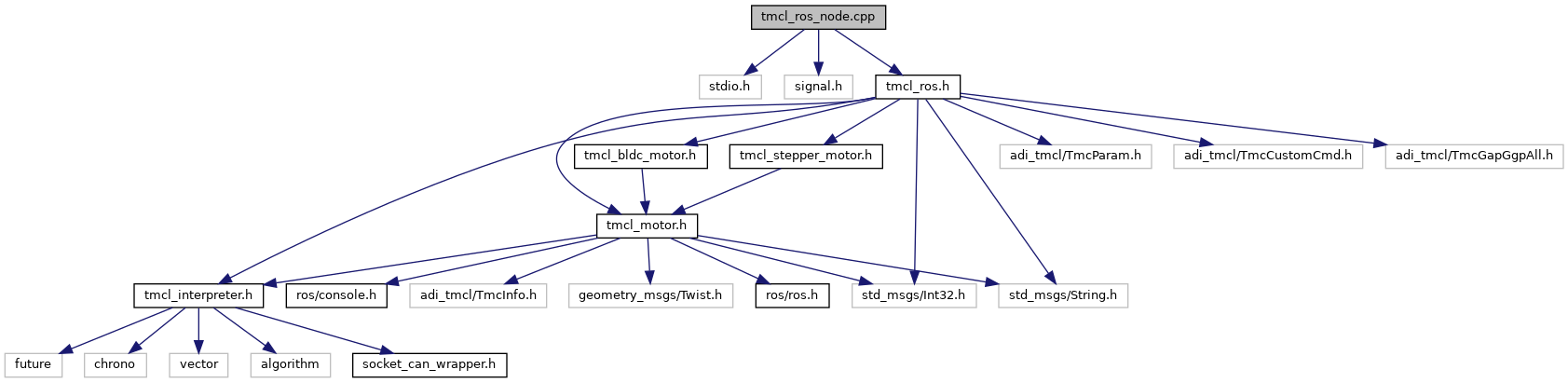
Include dependency graph for tmcl_ros_node.cpp:
Go to the source code of this file.
Functions | |
| void | graceful_shutdown () |
| int | main (int argc, char **argv) |
| void | signal_callback_handler (int signum) |
Variables | |
| bool | g_shutdown_signal = false |
| TmclROS * | p_tmc = nullptr |
Function Documentation
◆ graceful_shutdown()
| void graceful_shutdown | ( | ) |
Definition at line 19 of file tmcl_ros_node.cpp.
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Main Program
Definition at line 44 of file tmcl_ros_node.cpp.
◆ signal_callback_handler()
| void signal_callback_handler | ( | int | signum | ) |
Callback function for Ctrl-C handling
Definition at line 35 of file tmcl_ros_node.cpp.
Variable Documentation
◆ g_shutdown_signal
| bool g_shutdown_signal = false |
Definition at line 12 of file tmcl_ros_node.cpp.
◆ p_tmc
| TmclROS* p_tmc = nullptr |
Copyright (c) 2022-2023 Analog Devices, Inc. All Rights Reserved. This software is proprietary to Analog Devices, Inc. and its licensors.
Definition at line 11 of file tmcl_ros_node.cpp.