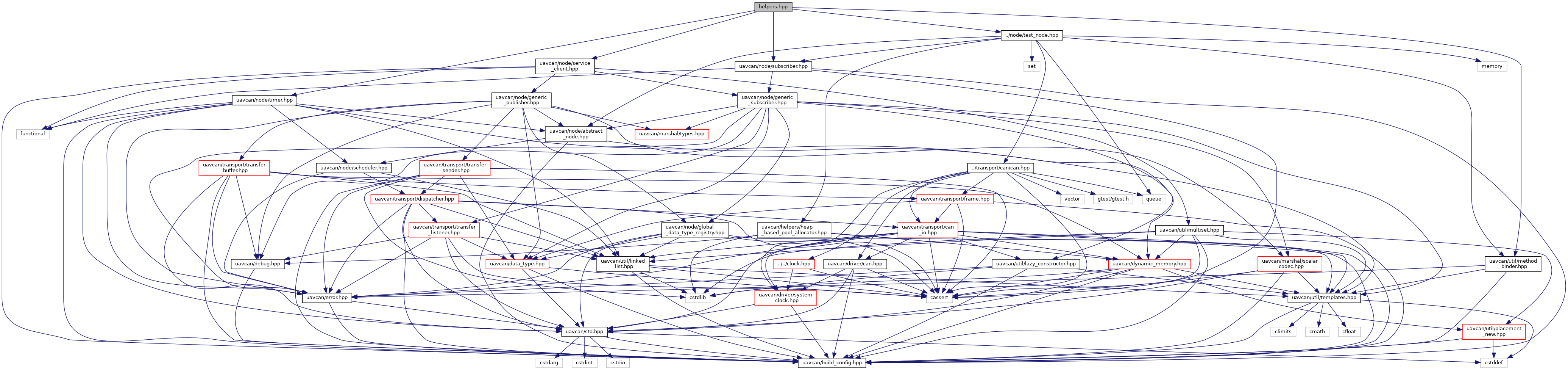
#include <uavcan/node/subscriber.hpp>#include <uavcan/node/timer.hpp>#include <uavcan/node/service_client.hpp>#include <uavcan/util/method_binder.hpp>#include "../node/test_node.hpp"
Include dependency graph for libuavcan/libuavcan/test/protocol/helpers.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | BackgroundSpinner |
| class | ServiceCallResultCollector< DataType >::Result |
| class | ServiceCallResultCollector< DataType > |
| struct | ServiceClientWithCollector< DataType > |
| struct | SubscriberWithCollector< DataType > |
| class | SubscriptionCollector< DataType > |
Functions | |
| template<typename CanDriver , typename MessageType > | |
| static void | emulateSingleFrameBroadcastTransfer (CanDriver &can, uavcan::NodeID node_id, const MessageType &message, uavcan::TransferID tid) |
Function Documentation
◆ emulateSingleFrameBroadcastTransfer()
template<typename CanDriver , typename MessageType >
|
inlinestatic |
Definition at line 135 of file libuavcan/libuavcan/test/protocol/helpers.hpp.