Dummy controller to show how to use the biotac tactiles to compute the force demand. More...
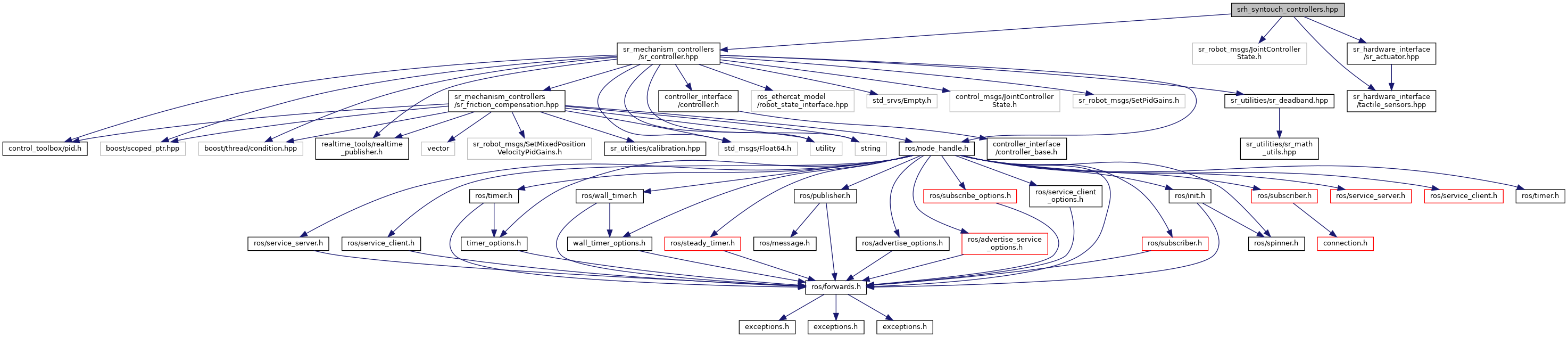
#include <sr_mechanism_controllers/sr_controller.hpp>#include <sr_robot_msgs/JointControllerState.h>#include <sr_hardware_interface/tactile_sensors.hpp>#include <sr_hardware_interface/sr_actuator.hpp>
Include dependency graph for srh_syntouch_controllers.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | controller::SrhSyntouchController |
Namespaces | |
| controller | |
Detailed Description
Dummy controller to show how to use the biotac tactiles to compute the force demand.
- Date
- Tue Dec 6 11:56:49 2011
Definition in file srh_syntouch_controllers.hpp.