This redefines the actuator to incorporate the information coming from our motor boards. More...
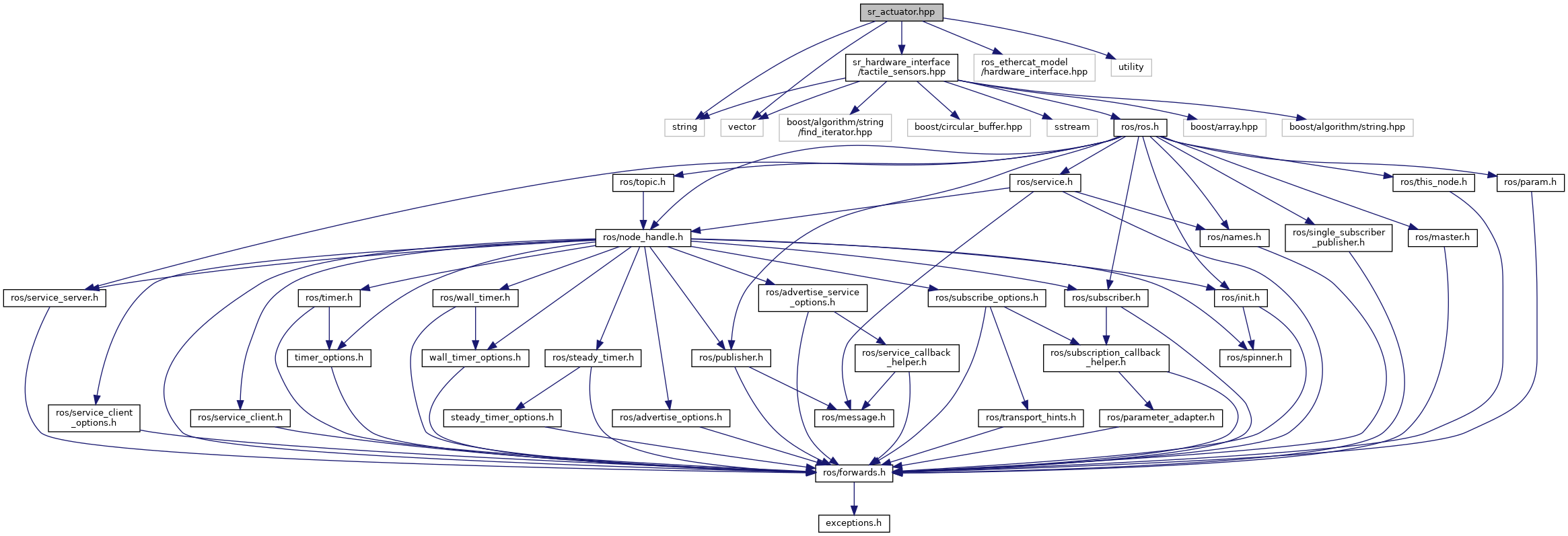
#include "sr_hardware_interface/tactile_sensors.hpp"#include <ros_ethercat_model/hardware_interface.hpp>#include <utility>#include <string>#include <vector>
Include dependency graph for sr_actuator.hpp:
Go to the source code of this file.
Classes | |
| class | sr_actuator::SrActuatorState |
| class | sr_actuator::SrMotorActuator |
| class | sr_actuator::SrMotorActuatorState |
| class | sr_actuator::SrMuscleActuator |
| class | sr_actuator::SrMuscleActuatorCommand |
| class | sr_actuator::SrMuscleActuatorState |
Namespaces | |
| sr_actuator | |
Detailed Description
This redefines the actuator to incorporate the information coming from our motor boards.
- Date
- Tue Jun 28 16:19:41 2011
Definition in file sr_actuator.hpp.