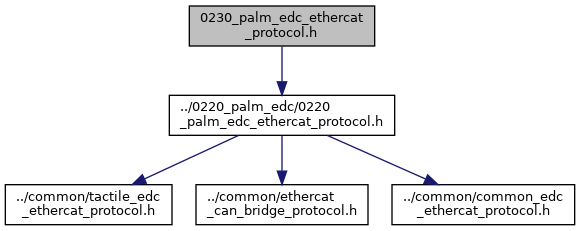
Go to the source code of this file.
Classes | |
| struct | __attribute__ |
| This needs to be a #define for symmetry with SENSORS_NUM. More... | |
| struct | __attribute__ |
| This needs to be a #define for symmetry with SENSORS_NUM. More... | |
Detailed Description
The term "Command" means data going from the ROS PC to the Node on the robot Previously known as "Incoming"
The term "Status" means data going from Node on the robot the to the ROS PC Previously known as "Outgoing"
Definition in file 0230_palm_edc_ethercat_protocol.h.
Macro Definition Documentation
◆ ETHERCAT_COMMAND_0230_AGREED_SIZE
| #define ETHERCAT_COMMAND_0230_AGREED_SIZE 62 |
Definition at line 145 of file 0230_palm_edc_ethercat_protocol.h.
◆ ETHERCAT_STATUS_0230_AGREED_SIZE
| #define ETHERCAT_STATUS_0230_AGREED_SIZE 416 |
Definition at line 144 of file 0230_palm_edc_ethercat_protocol.h.
◆ PALM_0230_ETHERCAT_CAN_BRIDGE_DATA_COMMAND_ADDRESS
| #define PALM_0230_ETHERCAT_CAN_BRIDGE_DATA_COMMAND_ADDRESS (PALM_0230_ETHERCAT_COMMAND_DATA_ADDRESS + PALM_0230_ETHERCAT_COMMAND_DATA_SIZE) |
Definition at line 162 of file 0230_palm_edc_ethercat_protocol.h.
◆ PALM_0230_ETHERCAT_CAN_BRIDGE_DATA_STATUS_ADDRESS
| #define PALM_0230_ETHERCAT_CAN_BRIDGE_DATA_STATUS_ADDRESS (PALM_0230_ETHERCAT_STATUS_DATA_ADDRESS + PALM_0230_ETHERCAT_STATUS_DATA_SIZE) |
Definition at line 165 of file 0230_palm_edc_ethercat_protocol.h.
◆ PALM_0230_ETHERCAT_COMMAND_DATA_ADDRESS
| #define PALM_0230_ETHERCAT_COMMAND_DATA_ADDRESS 0x1000 |
| ETHERCAT_COMMAND_DATA | ETHERCAT_CAN_BRIDGE_DATA_COMMAND | ETHERCAT_STATUS_DATA | ETHERCAT_CAN_BRIDGE_DATA_STATUS | | | | | | | | ETHERCAT_CAN_BRIDGE_DATA_STATUS_ADDRESS | | | | | ETHERCAT_STATUS_DATA_ADDRESS | | | ETHERCAT_CAN_BRIDGE_DATA_COMMAND_ADDRESS | ETHERCAT_COMMAND_DATA_ADDRESS
Definition at line 161 of file 0230_palm_edc_ethercat_protocol.h.
◆ PALM_0230_ETHERCAT_COMMAND_DATA_SIZE
| #define PALM_0230_ETHERCAT_COMMAND_DATA_SIZE sizeof(ETHERCAT_DATA_STRUCTURE_0230_PALM_EDC_COMMAND) |
Definition at line 137 of file 0230_palm_edc_ethercat_protocol.h.
◆ PALM_0230_ETHERCAT_COMMAND_HEADER_SIZE
| #define PALM_0230_ETHERCAT_COMMAND_HEADER_SIZE |
Definition at line 130 of file 0230_palm_edc_ethercat_protocol.h.
◆ PALM_0230_ETHERCAT_STATUS_DATA_ADDRESS
| #define PALM_0230_ETHERCAT_STATUS_DATA_ADDRESS (PALM_0230_ETHERCAT_CAN_BRIDGE_DATA_COMMAND_ADDRESS + ETHERCAT_CAN_BRIDGE_DATA_SIZE) |
Definition at line 164 of file 0230_palm_edc_ethercat_protocol.h.
◆ PALM_0230_ETHERCAT_STATUS_DATA_SIZE
| #define PALM_0230_ETHERCAT_STATUS_DATA_SIZE sizeof(ETHERCAT_DATA_STRUCTURE_0230_PALM_EDC_STATUS) |
Definition at line 136 of file 0230_palm_edc_ethercat_protocol.h.
◆ STATUS_AUX_LENGTH
| #define STATUS_AUX_LENGTH (STATUS_MOTOR_START - STATUS_AUX_START) |
Definition at line 104 of file 0230_palm_edc_ethercat_protocol.h.
◆ STATUS_AUX_START
| #define STATUS_AUX_START (offsetof(ETHERCAT_DATA_STRUCTURE_0230_PALM_EDC_STATUS, aux_spi_data_type)) |
Definition at line 97 of file 0230_palm_edc_ethercat_protocol.h.
◆ STATUS_HEADER_START
| #define STATUS_HEADER_START 0 |
Definition at line 95 of file 0230_palm_edc_ethercat_protocol.h.
◆ STATUS_IDLETIME_LENGTH
| #define STATUS_IDLETIME_LENGTH (STATUS_TOTAL_LENGTH - STATUS_IDLETIME_START) |
Definition at line 106 of file 0230_palm_edc_ethercat_protocol.h.
◆ STATUS_IDLETIME_START
| #define STATUS_IDLETIME_START (offsetof(ETHERCAT_DATA_STRUCTURE_0230_PALM_EDC_STATUS, idle_time_us)) |
Definition at line 99 of file 0230_palm_edc_ethercat_protocol.h.
◆ STATUS_JOINTS_LENGTH
| #define STATUS_JOINTS_LENGTH (STATUS_TACTILE_START - STATUS_HEADER_START) |
Definition at line 102 of file 0230_palm_edc_ethercat_protocol.h.
◆ STATUS_MOTOR_LENGTH
| #define STATUS_MOTOR_LENGTH (STATUS_IDLETIME_START - STATUS_MOTOR_START) |
Definition at line 105 of file 0230_palm_edc_ethercat_protocol.h.
◆ STATUS_MOTOR_START
| #define STATUS_MOTOR_START (offsetof(ETHERCAT_DATA_STRUCTURE_0230_PALM_EDC_STATUS, motor_data_type)) |
Definition at line 98 of file 0230_palm_edc_ethercat_protocol.h.
◆ STATUS_TACTILE_LENGTH
| #define STATUS_TACTILE_LENGTH (STATUS_AUX_START - STATUS_TACTILE_START) |
Definition at line 103 of file 0230_palm_edc_ethercat_protocol.h.
◆ STATUS_TACTILE_START
| #define STATUS_TACTILE_START (offsetof(ETHERCAT_DATA_STRUCTURE_0230_PALM_EDC_STATUS, tactile_data_type)) |
Definition at line 96 of file 0230_palm_edc_ethercat_protocol.h.
◆ STATUS_TOTAL_LENGTH
| #define STATUS_TOTAL_LENGTH (sizeof(ETHERCAT_DATA_STRUCTURE_0230_PALM_EDC_STATUS)) |
Definition at line 101 of file 0230_palm_edc_ethercat_protocol.h.