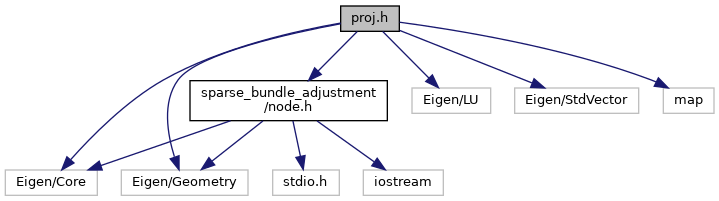
#include <Eigen/Core>
#include <Eigen/Geometry>
#include <Eigen/LU>
#include <Eigen/StdVector>
#include <map>
#include <sparse_bundle_adjustment/node.h>
Go to the source code of this file.
|
| class | sba::JacobProds |
| |
| class | sba::Proj |
| | Proj holds a projection measurement of a point onto a frame. They are a repository for the link between the frame and the point, with auxillary info such as Jacobians. More...
|
| |
| class | sba::Track |
| |
|
| typedef std::map< const int, Proj, std::less< int >, Eigen::aligned_allocator< Proj > > | sba::ProjMap |
| |
◆ EIGEN_USE_NEW_STDVECTOR
| #define EIGEN_USE_NEW_STDVECTOR |
Definition at line 5 of file proj.h.