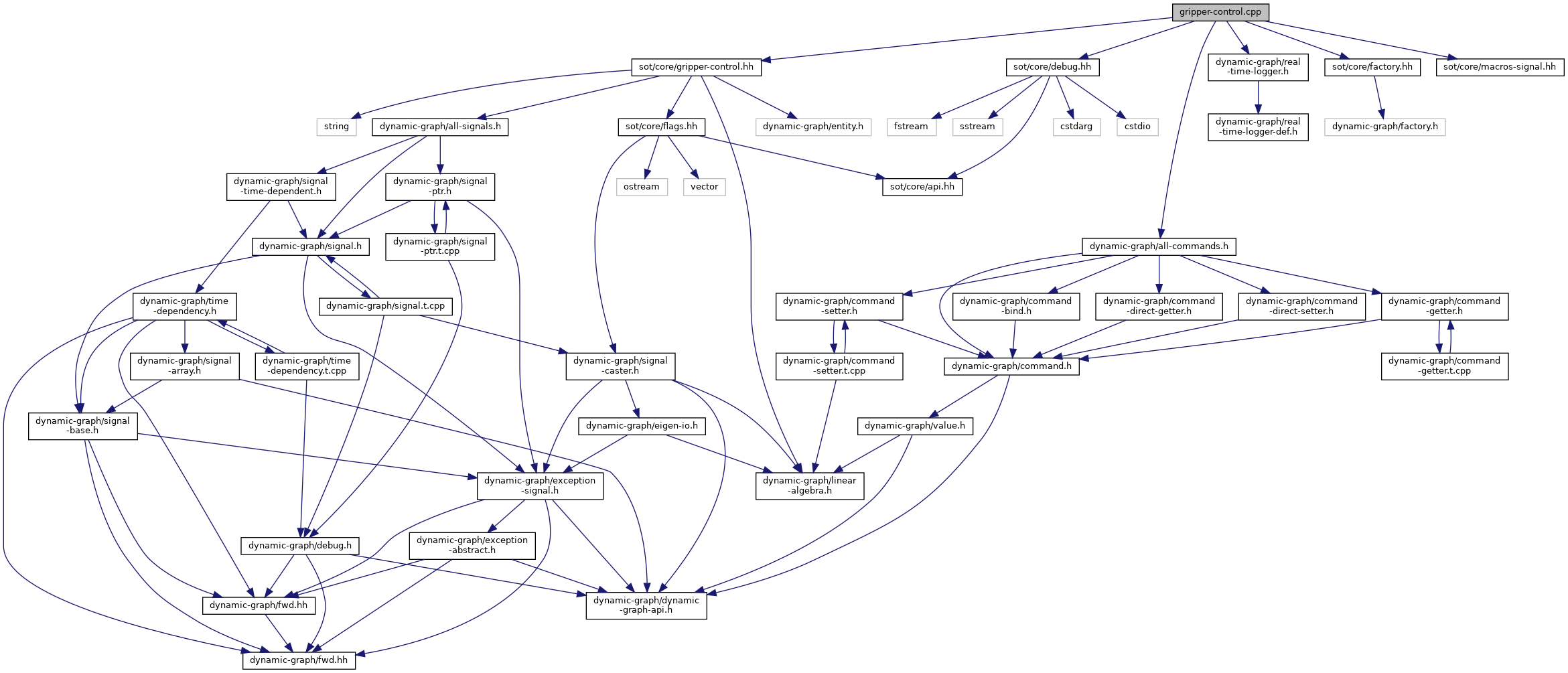
#include <dynamic-graph/all-commands.h>#include <dynamic-graph/real-time-logger.h>#include <sot/core/debug.hh>#include <sot/core/factory.hh>#include <sot/core/gripper-control.hh>#include <sot/core/macros-signal.hh>
Include dependency graph for gripper-control.cpp:
Go to the source code of this file.
Macros | |
| #define | ENABLE_RT_LOG |
| #define | SOT_FULL_TO_REDUCED(sotName) |
Functions | |
| DYNAMICGRAPH_FACTORY_ENTITY_PLUGIN (GripperControlPlugin, "GripperControl") | |
Variables | |
| const double | DT = 0.005 |
Macro Definition Documentation
◆ ENABLE_RT_LOG
| #define ENABLE_RT_LOG |
Definition at line 10 of file gripper-control.cpp.
◆ SOT_FULL_TO_REDUCED
| #define SOT_FULL_TO_REDUCED | ( | sotName | ) |
Value:
sotName##FullSizeSIN(NULL, "GripperControl(" + name + \
")::input(vector)::" + #sotName + "FullIN"), \
sotName##ReduceSOUT( \
SOT_INIT_SIGNAL_2(GripperControlPlugin::selector, \
sotName##FullSizeSIN, dynamicgraph::Vector, \
selectionSIN, Flags), \
"ReducedOUT")
Eigen::VectorXd Vector
#define SOT_INIT_SIGNAL_2(sotFunction, sotArg1, sotArg1Type, sotArg2, sotArg2Type)
Definition: macros-signal.hh:24
Definition: flags.hh:33
Definition at line 29 of file gripper-control.cpp.
Function Documentation
◆ DYNAMICGRAPH_FACTORY_ENTITY_PLUGIN()
| DYNAMICGRAPH_FACTORY_ENTITY_PLUGIN | ( | GripperControlPlugin | , |
| "GripperControl" | |||
| ) |
Variable Documentation
◆ DT
| const double DT = 0.005 |
Definition at line 42 of file gripper-control.cpp.