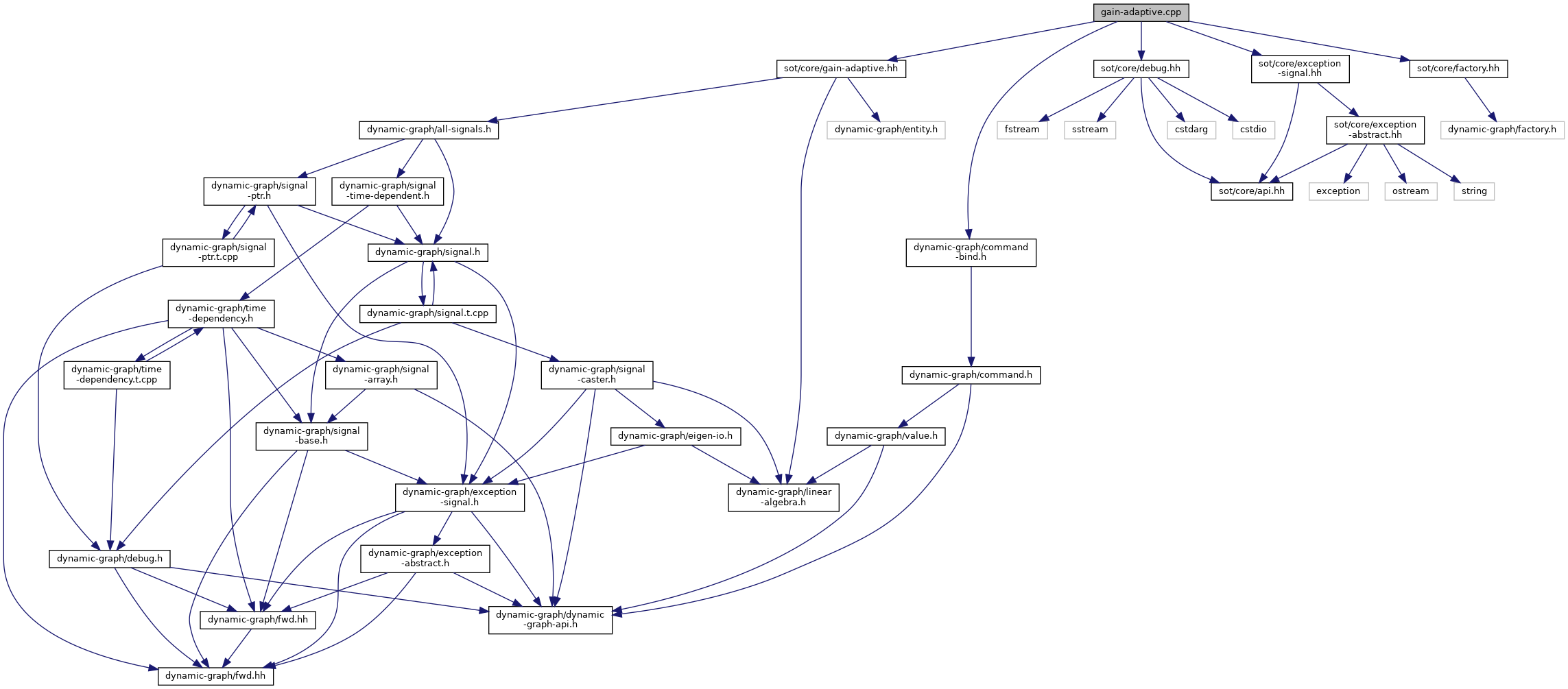
#include <sot/core/gain-adaptive.hh>#include <dynamic-graph/command-bind.h>#include <sot/core/debug.hh>#include <sot/core/exception-signal.hh>#include <sot/core/factory.hh>
Include dependency graph for gain-adaptive.cpp:
Go to the source code of this file.
Macros | |
| #define | __SOT_GAIN_ADAPTATIVE_INIT |
Functions | |
| DYNAMICGRAPH_FACTORY_ENTITY_PLUGIN (GainAdaptive, "GainAdaptive") | |
Macro Definition Documentation
◆ __SOT_GAIN_ADAPTATIVE_INIT
| #define __SOT_GAIN_ADAPTATIVE_INIT |
Value:
gainSOUT(boost::bind(&GainAdaptive::computeGain, this, _1, _2), \
errorSIN, \
Definition at line 35 of file gain-adaptive.cpp.
Function Documentation
◆ DYNAMICGRAPH_FACTORY_ENTITY_PLUGIN()
| DYNAMICGRAPH_FACTORY_ENTITY_PLUGIN | ( | GainAdaptive | , |
| "GainAdaptive" | |||
| ) |