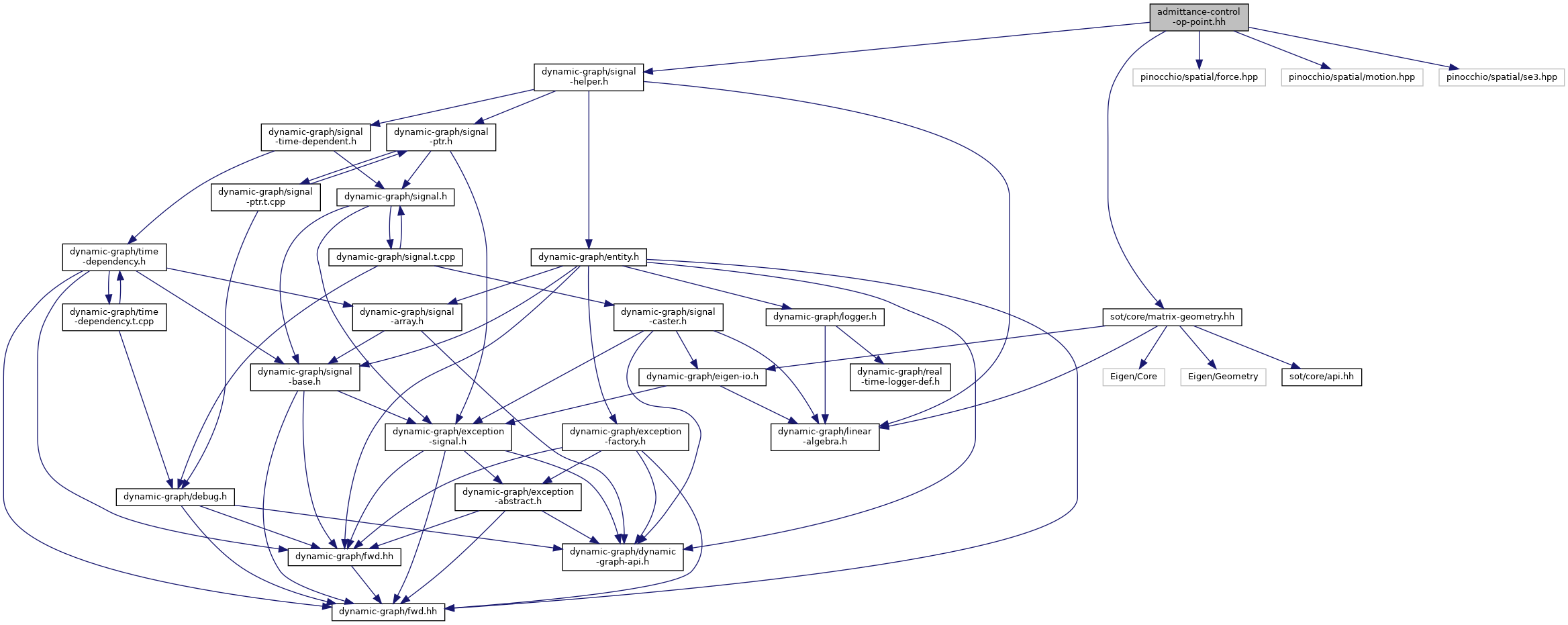
#include <dynamic-graph/signal-helper.h>#include <sot/core/matrix-geometry.hh>#include "pinocchio/spatial/force.hpp"#include "pinocchio/spatial/motion.hpp"#include "pinocchio/spatial/se3.hpp"
Include dependency graph for admittance-control-op-point.hh:
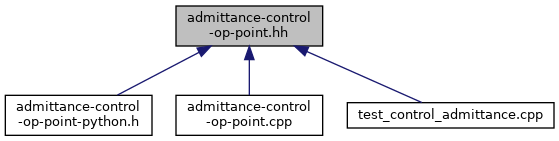
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | dynamicgraph::sot::core::AdmittanceControlOpPoint |
| Admittance controller for an operational point wrt to a force sensor. It can be a point of the model (hand) or not (created operational point: an object in the hand of the robot) Which is closed to a force sensor (for instance the right or left wrist ft) More... | |
Namespaces | |
| dynamicgraph | |
| dynamicgraph::sot | |
| dynamicgraph::sot::core | |
Macros | |
| #define | ADMITTANCECONTROLOPPOINT_EXPORT |
Macro Definition Documentation
◆ ADMITTANCECONTROLOPPOINT_EXPORT
| #define ADMITTANCECONTROLOPPOINT_EXPORT |
Definition at line 25 of file admittance-control-op-point.hh.