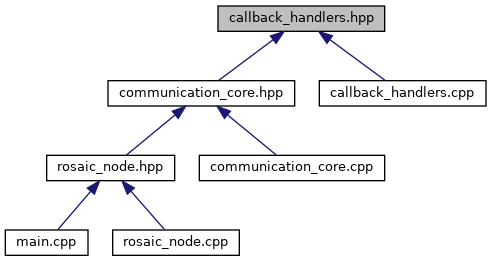
Handles callbacks when reading NMEA/SBF messages. More...
#include <boost/foreach.hpp>#include <boost/function.hpp>#include <boost/thread.hpp>#include <boost/thread/condition.hpp>#include <boost/tokenizer.hpp>#include <boost/algorithm/string/join.hpp>#include <boost/date_time/posix_time/posix_time.hpp>#include <boost/asio.hpp>#include <boost/asio/serial_port.hpp>#include <boost/bind.hpp>#include <boost/format.hpp>#include <boost/thread/mutex.hpp>#include <algorithm>#include <septentrio_gnss_driver/communication/rx_message.hpp>
Go to the source code of this file.
Classes | |
| class | io_comm_rx::AbstractCallbackHandler |
| class | io_comm_rx::CallbackHandler< T > |
| Abstract class representing a generic callback handler, includes high-level functionality such as wait. More... | |
| class | io_comm_rx::CallbackHandlers |
| Represents ensemble of (to be constructed) ROS messages, to be handled at once by this class. More... | |
Namespaces | |
| io_comm_rx | |
Variables | |
| boost::condition_variable | g_cd_condition |
| Condition variable complementing "g_cd_mutex". More... | |
| uint32_t | g_cd_count |
| boost::mutex | g_cd_mutex |
| Mutex to control changes of global variable "g_cd_received". More... | |
| bool | g_cd_received |
| Determines whether the connection descriptor was received from the Rx. More... | |
| boost::condition_variable | g_response_condition |
| Condition variable complementing "g_response_mutex". More... | |
| boost::mutex | g_response_mutex |
| Mutex to control changes of global variable "g_response_received". More... | |
| bool | g_response_received |
| Determines whether a command reply was received from the Rx. More... | |
| std::string | g_rx_tcp_port |
| Rx TCP port, e.g. IP10 or IP11, to which ROSaic is connected to. More... | |
Detailed Description
Handles callbacks when reading NMEA/SBF messages.
- Date
- 22/08/20
Definition in file callback_handlers.hpp.
Variable Documentation
◆ g_cd_condition
| boost::condition_variable g_cd_condition |
Condition variable complementing "g_cd_mutex".
Definition at line 112 of file communication_core.cpp.
◆ g_cd_count
| uint32_t g_cd_count |
Since after SSSSSSSSSSS we need to wait for second connection descriptor, we have to count the connection descriptors
Definition at line 120 of file communication_core.cpp.
◆ g_cd_mutex
| boost::mutex g_cd_mutex |
Mutex to control changes of global variable "g_cd_received".
Definition at line 108 of file communication_core.cpp.
◆ g_cd_received
| bool g_cd_received |
Determines whether the connection descriptor was received from the Rx.
Definition at line 110 of file communication_core.cpp.
◆ g_response_condition
| boost::condition_variable g_response_condition |
Condition variable complementing "g_response_mutex".
Definition at line 106 of file communication_core.cpp.
◆ g_response_mutex
| boost::mutex g_response_mutex |
Mutex to control changes of global variable "g_response_received".
Definition at line 102 of file communication_core.cpp.
◆ g_response_received
| bool g_response_received |
Determines whether a command reply was received from the Rx.
Definition at line 104 of file communication_core.cpp.
◆ g_rx_tcp_port
| std::string g_rx_tcp_port |
Rx TCP port, e.g. IP10 or IP11, to which ROSaic is connected to.
Definition at line 117 of file communication_core.cpp.