robot_localization wiki¶
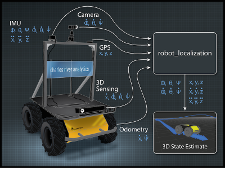
robot_localization is a collection of state estimation nodes, each of which is an implementation of a nonlinear state estimator for robots moving in 3D space. It contains two state estimation nodes, ekf_localization_node and ukf_localization_node. In addition, robot_localization provides navsat_transform_node, which aids in the integration of GPS data.
Features¶
All the state estimation nodes in robot_localization share common features, namely:
- Fusion of an arbitrary number of sensors. The nodes do not restrict the number of input sources. If, for example, your robot has multiple IMUs or multiple sources of odometry information, the state estimation nodes within
robot_localizationcan support all of them. - Support for multiple ROS message types. All state estimation nodes in
robot_localizationcan take in nav_msgs/Odometry, sensor_msgs/Imu, geometry_msgs/PoseWithCovarianceStamped, or geometry_msgs/TwistWithCovarianceStamped messages. - Per-sensor input customization. If a given sensor message contains data that you don’t want to include in your state estimate, the state estimation nodes in
robot_localizationallow you to exclude that data on a per-sensor basis. - Continuous estimation. Each state estimation node in
robot_localizationbegins estimating the vehicle’s state as soon as it receives a single measurement. If there is a holiday in the sensor data (i.e., a long period in which no data is received), the filter will continue to estimate the robot’s state via an internal motion model.
All state estimation nodes track the 15-dimensional state of the vehicle: \((X, Y, Z, roll, pitch, yaw, \dot{X}, \dot{Y}, \dot{Z}, \dot{roll}, \dot{pitch}, \dot{yaw}, \ddot{X}, \ddot{Y}, \ddot{Z})\).
Other Resources¶
If you’re new to robot_localization, check out the 2015 ROSCon talk for some pointers on getting started.
Further details can be found in this paper:
@inproceedings{MooreStouchKeneralizedEkf2014,
author = {T. Moore and D. Stouch},
title = {A Generalized Extended Kalman Filter Implementation for the Robot Operating System},
year = {2014},
month = {July},
booktitle = {Proceedings of the 13th International Conference on Intelligent Autonomous Systems (IAS-13)},
publisher = {Springer}
}