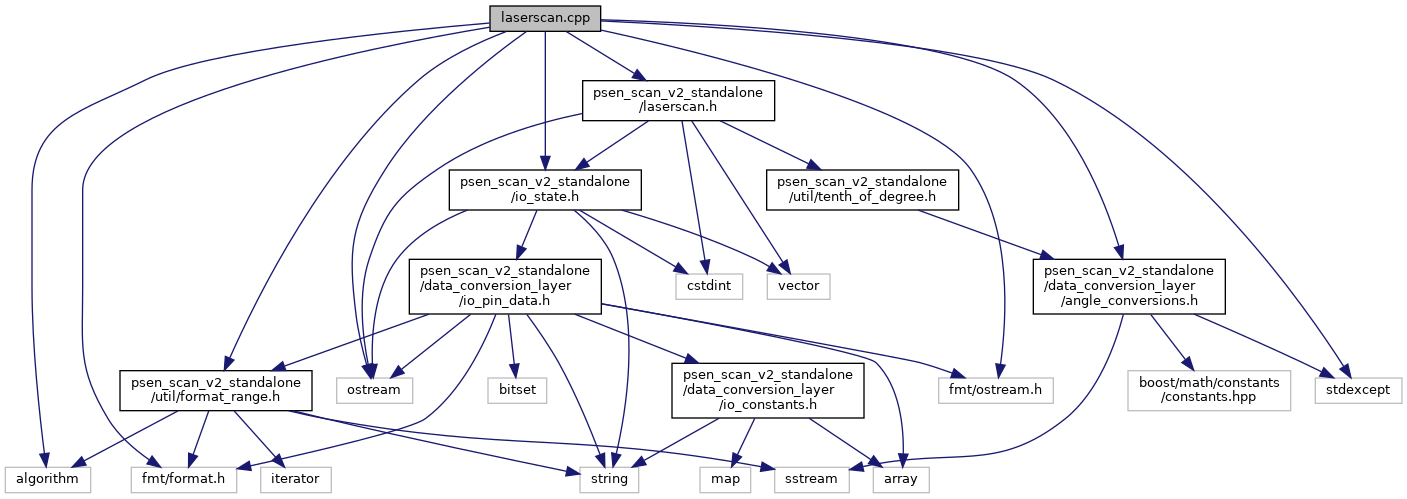
#include <algorithm>#include <ostream>#include <stdexcept>#include <fmt/format.h>#include <fmt/ostream.h>#include "psen_scan_v2_standalone/data_conversion_layer/angle_conversions.h"#include "psen_scan_v2_standalone/io_state.h"#include "psen_scan_v2_standalone/laserscan.h"#include "psen_scan_v2_standalone/util/format_range.h"
Include dependency graph for laserscan.cpp:
Go to the source code of this file.
Namespaces | |
| psen_scan_v2_standalone | |
| Root namespace in which the software components to communicate with the scanner (firmware-version: 2) are realised/implemented. | |
Functions | |
| std::ostream & | psen_scan_v2_standalone::operator<< (std::ostream &os, const LaserScan &scan) |
Variables | |
| static const util::TenthOfDegree | psen_scan_v2_standalone::MAX_X_AXIS_ROTATION { 275 } |