#include <pf_data_publisher.h>
Public Member Functions | |
| PFDataPublisher (std::shared_ptr< ScanConfig > config, std::shared_ptr< ScanParameters > params) | |
| virtual void | read (PFR2000Packet_A &packet) |
| virtual void | read (PFR2000Packet_B &packet) |
| virtual void | read (PFR2000Packet_C &packet) |
| virtual void | read (PFR2300Packet_C1 &packet) |
| virtual bool | start () |
| virtual bool | stop () |
 Public Member Functions inherited from PFPacketReader Public Member Functions inherited from PFPacketReader | |
| virtual void | read (std::shared_ptr< PFPacket > packet) |
| Public Member Functions inherited from Reader< PFPacket > | |
| virtual void | set_scan_params (ScanParameters params) |
| virtual void | set_scanoutput_config (ScanConfig config) |
Protected Member Functions | |
| bool | check_status (uint32_t status_flags) |
| virtual void | handle_scan (sensor_msgs::LaserScanPtr msg, uint16_t layer_idx, int layer_inclination, bool apply_correction=true)=0 |
| virtual void | resetCurrentScans () |
| template<typename T > | |
| void | to_msg_queue (T &packet, uint16_t layer_idx=0, int layer_inclination=0) |
Protected Attributes | |
| std::shared_ptr< ScanConfig > | config_ |
| std::deque< sensor_msgs::LaserScanPtr > | d_queue_ |
| std::string | frame_id_ |
| ros::Publisher | header_publisher_ |
| ros::NodeHandle | nh_ |
| std::shared_ptr< ScanParameters > | params_ |
| std::mutex | q_mutex_ |
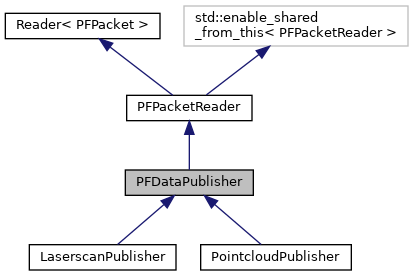
Detailed Description
Definition at line 11 of file pf_data_publisher.h.
Constructor & Destructor Documentation
◆ PFDataPublisher()
| PFDataPublisher::PFDataPublisher | ( | std::shared_ptr< ScanConfig > | config, |
| std::shared_ptr< ScanParameters > | params | ||
| ) |
Definition at line 11 of file pf_data_publisher.cpp.
Member Function Documentation
◆ check_status()
|
protected |
Definition at line 136 of file pf_data_publisher.cpp.
◆ handle_scan()
|
protectedpure virtual |
Implemented in PointcloudPublisher, and LaserscanPublisher.
◆ read() [1/4]
|
virtual |
Implements PFPacketReader.
Definition at line 16 of file pf_data_publisher.cpp.
◆ read() [2/4]
|
virtual |
Implements PFPacketReader.
Definition at line 22 of file pf_data_publisher.cpp.
◆ read() [3/4]
|
virtual |
Implements PFPacketReader.
Definition at line 28 of file pf_data_publisher.cpp.
◆ read() [4/4]
|
virtual |
Implements PFPacketReader.
Definition at line 34 of file pf_data_publisher.cpp.
◆ resetCurrentScans()
|
inlineprotectedvirtual |
Reimplemented in PointcloudPublisher.
Definition at line 42 of file pf_data_publisher.h.
◆ start()
|
virtual |
Reimplemented from PFPacketReader.
Definition at line 40 of file pf_data_publisher.cpp.
◆ stop()
|
virtual |
Reimplemented from PFPacketReader.
Definition at line 45 of file pf_data_publisher.cpp.
◆ to_msg_queue()
|
protected |
Definition at line 54 of file pf_data_publisher.cpp.
Member Data Documentation
◆ config_
|
protected |
Definition at line 32 of file pf_data_publisher.h.
◆ d_queue_
|
protected |
Definition at line 29 of file pf_data_publisher.h.
◆ frame_id_
|
protected |
Definition at line 27 of file pf_data_publisher.h.
◆ header_publisher_
|
protected |
Definition at line 28 of file pf_data_publisher.h.
◆ nh_
|
protected |
Definition at line 26 of file pf_data_publisher.h.
◆ params_
|
protected |
Definition at line 33 of file pf_data_publisher.h.
◆ q_mutex_
|
protected |
Definition at line 30 of file pf_data_publisher.h.
The documentation for this class was generated from the following files: