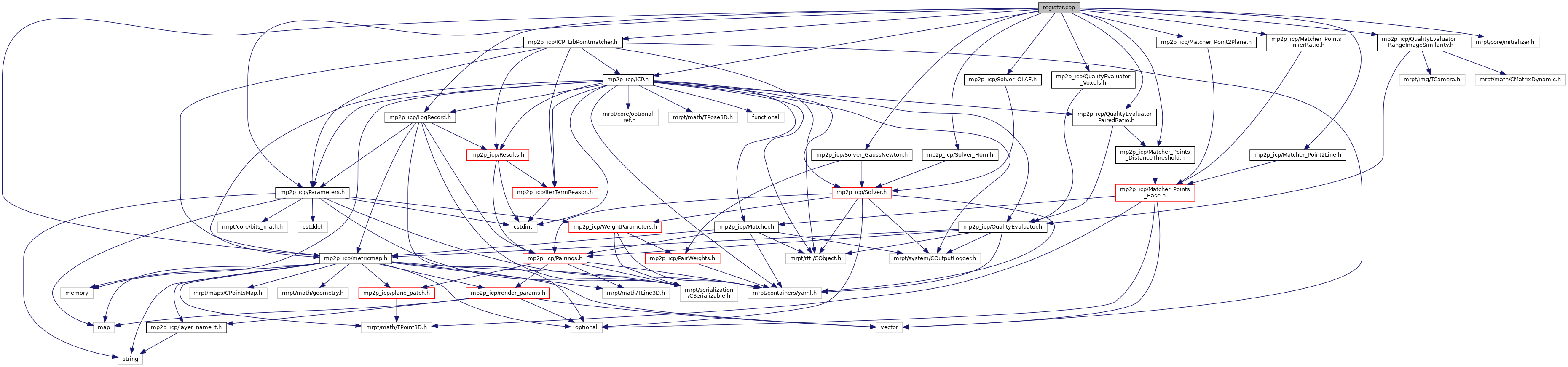
#include <mp2p_icp/ICP.h>#include <mp2p_icp/ICP_LibPointmatcher.h>#include <mp2p_icp/LogRecord.h>#include <mp2p_icp/Matcher_Point2Line.h>#include <mp2p_icp/Matcher_Point2Plane.h>#include <mp2p_icp/Matcher_Points_DistanceThreshold.h>#include <mp2p_icp/Matcher_Points_InlierRatio.h>#include <mp2p_icp/Parameters.h>#include <mp2p_icp/QualityEvaluator_PairedRatio.h>#include <mp2p_icp/QualityEvaluator_RangeImageSimilarity.h>#include <mp2p_icp/QualityEvaluator_Voxels.h>#include <mp2p_icp/Solver_GaussNewton.h>#include <mp2p_icp/Solver_Horn.h>#include <mp2p_icp/Solver_OLAE.h>#include <mp2p_icp/metricmap.h>#include <mrpt/core/initializer.h>
Include dependency graph for src/register.cpp:
Go to the source code of this file.
Functions | |
| MRPT_INITIALIZER (register_mp2p_icp) | |
Function Documentation
◆ MRPT_INITIALIZER()
| MRPT_INITIALIZER | ( | register_mp2p_icp | ) |
Definition at line 30 of file src/register.cpp.