Base class for classes used to construct diffent trajectory types. More...
#include <trajectory_builder.h>
Public Member Functions | |
| virtual bool | buildTrajectory (Trajectory *trajectory)=0 |
| Creates the type of trajectory described by the builder. More... | |
| virtual void | reset () |
| Ensures re-usability by allowing the user to reset members of the builder which should be reset between calls to buildTrajectory(). More... | |
| TrajectoryBuilder< SegmentImpl > * | setGoalHandle (RealtimeGoalHandlePtr &goal_handle) |
| Set the goal handle that will be attached to the trajectory segments. More... | |
| TrajectoryBuilder< SegmentImpl > * | setStartTime (const typename Segment::Time &start_time) |
| Set the start time [seconds] of the trajectory to be built. More... | |
| virtual | ~TrajectoryBuilder ()=default |
| Virtual destructor because this class is a base class. More... | |
Protected Member Functions | |
| RealtimeGoalHandlePtr | createGoalHandlePtr () const |
| Return the set goal handle or a default one, if no goal handle was set. More... | |
| const boost::optional< typename Segment::Time > & | getStartTime () const |
| Return the set start time. More... | |
Static Protected Member Functions | |
| static RealtimeGoalHandlePtr | createDefaultGoalHandle () |
| static bool | isTrajectoryValid (const Trajectory *trajectory, const unsigned int expected_number_of_joints, const unsigned int expected_number_of_segments) |
| Check if the elements of a given trajectory are sized properly. More... | |
Private Types | |
| using | RealtimeGoalHandle = realtime_tools::RealtimeServerGoalHandle< control_msgs::FollowJointTrajectoryAction > |
| using | RealtimeGoalHandlePtr = boost::shared_ptr< RealtimeGoalHandle > |
| using | Segment = JointTrajectorySegment< SegmentImpl > |
| using | Trajectory = std::vector< TrajectoryPerJoint > |
| using | TrajectoryPerJoint = std::vector< Segment > |
Private Attributes | |
| boost::optional< RealtimeGoalHandlePtr & > | goal_handle_ {boost::none} |
| boost::optional< typename Segment::Time > | start_time_ {boost::none} |
Detailed Description
template<class SegmentImpl>
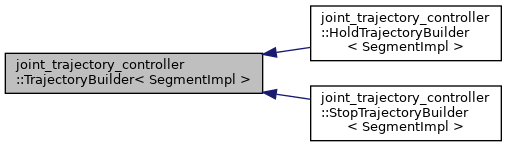
class joint_trajectory_controller::TrajectoryBuilder< SegmentImpl >
Base class for classes used to construct diffent trajectory types.
A derived class has to implement buildTrajectory().
The following code snippet shows the intended usage of a builder class:
Setting a start time is mandatory whereas setting a goal handle can be omitted. Also note that trajectory has to reference a valid trajectory (see isTrajectoryValid()).
Definition at line 64 of file trajectory_builder.h.
Member Typedef Documentation
◆ RealtimeGoalHandle
|
private |
Definition at line 77 of file trajectory_builder.h.
◆ RealtimeGoalHandlePtr
|
private |
Definition at line 78 of file trajectory_builder.h.
◆ Segment
|
private |
Definition at line 73 of file trajectory_builder.h.
◆ Trajectory
|
private |
Definition at line 75 of file trajectory_builder.h.
◆ TrajectoryPerJoint
|
private |
Definition at line 74 of file trajectory_builder.h.
Constructor & Destructor Documentation
◆ ~TrajectoryBuilder()
|
virtualdefault |
Virtual destructor because this class is a base class.
Member Function Documentation
◆ buildTrajectory()
|
pure virtual |
Creates the type of trajectory described by the builder.
- Parameters
-
trajectory [Out] Trajectory which has to be build.
Implemented in joint_trajectory_controller::StopTrajectoryBuilder< SegmentImpl >, and joint_trajectory_controller::HoldTrajectoryBuilder< SegmentImpl, HardwareInterface >.
◆ createDefaultGoalHandle()
|
inlinestaticprotected |
Definition at line 165 of file trajectory_builder.h.
◆ createGoalHandlePtr()
|
inlineprotected |
Return the set goal handle or a default one, if no goal handle was set.
Definition at line 159 of file trajectory_builder.h.
◆ getStartTime()
|
inlineprotected |
Return the set start time.
Definition at line 146 of file trajectory_builder.h.
◆ isTrajectoryValid()
|
staticprotected |
Check if the elements of a given trajectory are sized properly.
- Parameters
-
trajectory expected_number_of_joints The count of TrajectoryPerJoint in trajectoryhas to match the number of joints.expected_number_of_segments Each TrajectoryPerJoint in trajectoryhas to contain this number of segments.
Definition at line 178 of file trajectory_builder.h.
◆ reset()
|
inlinevirtual |
Ensures re-usability by allowing the user to reset members of the builder which should be reset between calls to buildTrajectory().
Definition at line 171 of file trajectory_builder.h.
◆ setGoalHandle()
|
inline |
Set the goal handle that will be attached to the trajectory segments.
The goal handle is reset by reset().
Definition at line 152 of file trajectory_builder.h.
◆ setStartTime()
|
inline |
Set the start time [seconds] of the trajectory to be built.
The start time is reset by reset().
Definition at line 139 of file trajectory_builder.h.
Member Data Documentation
◆ goal_handle_
|
private |
Definition at line 134 of file trajectory_builder.h.
◆ start_time_
|
private |
Definition at line 131 of file trajectory_builder.h.
The documentation for this class was generated from the following file: