Parallel Input/Output (PIO) interrupt handler for SAM. More...
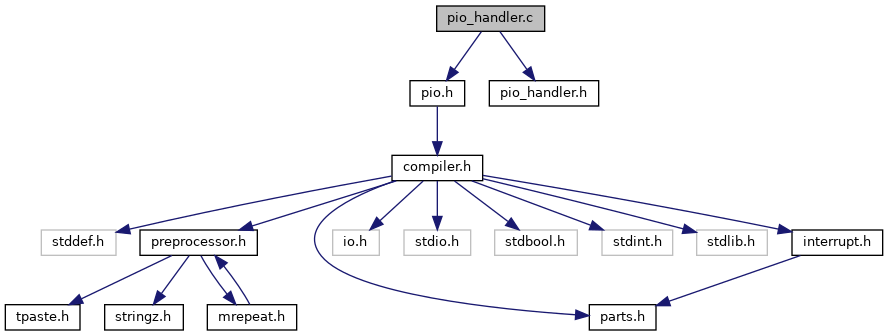
Go to the source code of this file.
Classes | |
| struct | s_interrupt_source |
Macros | |
| #define | MAX_INTERRUPT_SOURCES 7 |
Functions | |
| void | pio_handler_process (Pio *p_pio, uint32_t ul_id) |
| Process an interrupt request on the given PIO controller. More... | |
| uint32_t | pio_handler_set (Pio *p_pio, uint32_t ul_id, uint32_t ul_mask, uint32_t ul_attr, void(*p_handler)(uint32_t, uint32_t)) |
| Set an interrupt handler for the provided pins. The provided handler will be called with the triggering pin as its parameter as soon as an interrupt is detected. More... | |
| void | pio_handler_set_priority (Pio *p_pio, IRQn_Type ul_irqn, uint32_t ul_priority) |
| Initialize PIO interrupt management logic. More... | |
Variables | |
| static struct s_interrupt_source | gs_interrupt_sources [MAX_INTERRUPT_SOURCES] |
| static uint32_t | gs_ul_nb_sources = 0 |
Detailed Description
Parallel Input/Output (PIO) interrupt handler for SAM.
Copyright (c) 2011-2018 Microchip Technology Inc. and its subsidiaries.
Definition in file pio_handler.c.
Macro Definition Documentation
◆ MAX_INTERRUPT_SOURCES
| #define MAX_INTERRUPT_SOURCES 7 |
Maximum number of interrupt sources that can be defined. This constant can be increased, but the current value is the smallest possible one that will be compatible with all existing projects.
Definition at line 45 of file pio_handler.c.
Function Documentation
◆ pio_handler_process()
| void pio_handler_process | ( | Pio * | p_pio, |
| uint32_t | ul_id | ||
| ) |
Process an interrupt request on the given PIO controller.
- Parameters
-
p_pio PIO controller base address. ul_id PIO controller ID.
Definition at line 79 of file pio_handler.c.
◆ pio_handler_set()
| uint32_t pio_handler_set | ( | Pio * | p_pio, |
| uint32_t | ul_id, | ||
| uint32_t | ul_mask, | ||
| uint32_t | ul_attr, | ||
| void(*)(uint32_t, uint32_t) | p_handler | ||
| ) |
Set an interrupt handler for the provided pins. The provided handler will be called with the triggering pin as its parameter as soon as an interrupt is detected.
- Parameters
-
p_pio PIO controller base address. ul_id PIO ID. ul_mask Pins (bit mask) to configure. ul_attr Pins attribute to configure. p_handler Interrupt handler function pointer.
- Returns
- 0 if successful, 1 if the maximum number of sources has been defined.
Definition at line 132 of file pio_handler.c.
◆ pio_handler_set_priority()
Initialize PIO interrupt management logic.
- Parameters
-
p_pio PIO controller base address. ul_irqn NVIC line number. ul_priority PIO controller interrupts priority.
Definition at line 274 of file pio_handler.c.
Variable Documentation
◆ gs_interrupt_sources
|
static |
Definition at line 62 of file pio_handler.c.
◆ gs_ul_nb_sources
|
static |
Definition at line 65 of file pio_handler.c.