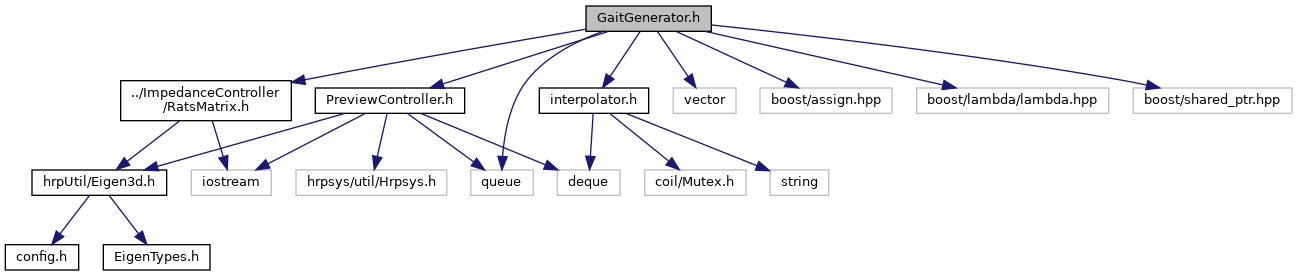
#include "PreviewController.h"#include "../ImpedanceController/RatsMatrix.h"#include "interpolator.h"#include <vector>#include <queue>#include <boost/assign.hpp>#include <boost/lambda/lambda.hpp>#include <boost/shared_ptr.hpp>
Include dependency graph for GaitGenerator.h:
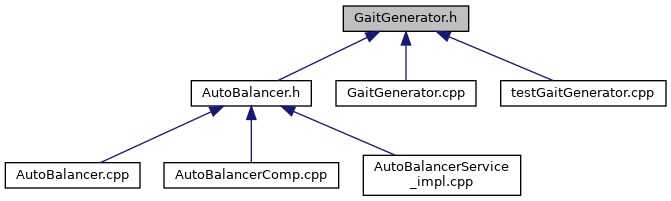
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| rats | |
Enumerations | |
| enum | rats::leg_type { rats::RLEG, rats::LLEG, rats::RARM, rats::LARM, rats::BOTH, rats::ALL } |
| enum | rats::orbit_type { rats::SHUFFLING, rats::CYCLOID, rats::RECTANGLE, rats::STAIR, rats::CYCLOIDDELAY, rats::CYCLOIDDELAYKICK, rats::CROSS } |
| enum | rats::stride_limitation_type { rats::SQUARE, rats::CIRCLE } |
| enum | rats::toe_heel_phase { rats::SOLE0, rats::SOLE2TOE, rats::TOE2SOLE, rats::SOLE1, rats::SOLE2HEEL, rats::HEEL2SOLE, rats::SOLE2, rats::NUM_TH_PHASES } |
| enum | rats::toe_heel_type { rats::SOLE, rats::TOE, rats::HEEL } |
Functions | |
| void | rats::cycloid_midpoint (hrp::Vector3 &ret, const double ratio, const hrp::Vector3 &start, const hrp::Vector3 &goal, const double height, const double default_top_ratio) |
| std::string | rats::leg_type_to_leg_type_string (const leg_type l_r) |
| void | rats::multi_mid_coords (coordinates &ret, const std::vector< coordinates > &cs, const double eps) |
| double | rats::set_value_according_to_toe_heel_type (const toe_heel_type tht, const double toe_value, const double heel_value, const double default_value) |
Variables | |
| static double | rats::no_using_toe_heel_ratio = 1.0 |
| static double | rats::using_toe_heel_ratio = 0.0 |