#include <limits>#include <iostream>#include <hpp/fcl/narrowphase/gjk.h>#include <hpp/fcl/collision_data.h>
Include dependency graph for narrowphase.h:
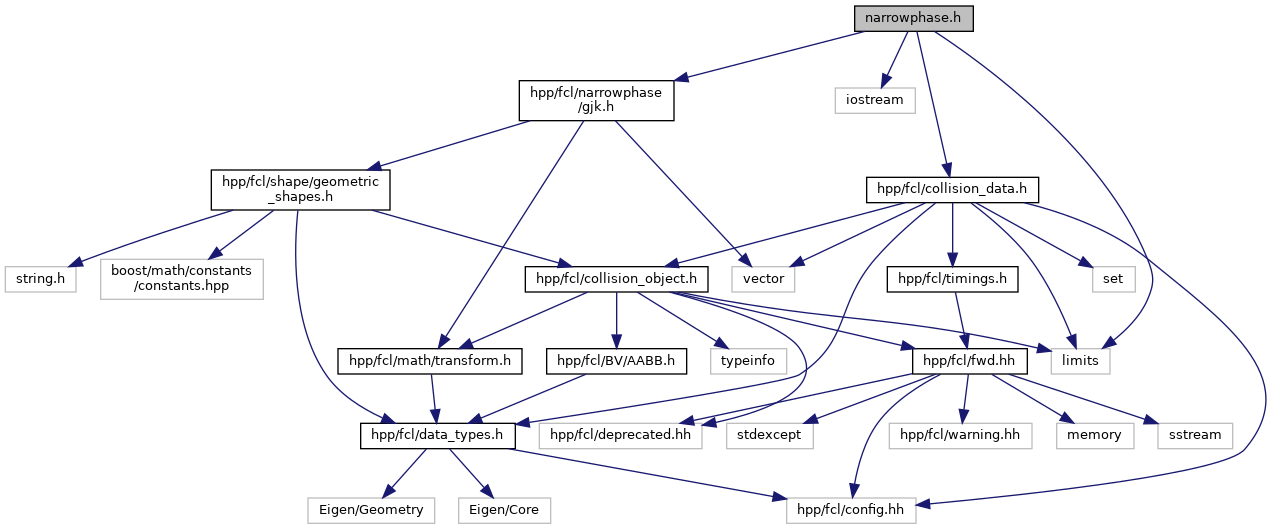
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | hpp::fcl::GJKSolver |
| collision and distance solver based on GJK algorithm implemented in fcl (rewritten the code from the GJK in bullet) More... | |
Namespaces | |
| hpp | |
| Main namespace. | |
| hpp::fcl | |
Macros | |
| #define | SHAPE_DISTANCE_SPECIALIZATION(S1, S2) |
| #define | SHAPE_DISTANCE_SPECIALIZATION_BASE(S1, S2) |
| #define | SHAPE_INTERSECT_SPECIALIZATION(S1, S2) |
| #define | SHAPE_INTERSECT_SPECIALIZATION_BASE(S1, S2) |
Shape triangle interaction specializations | |
| #define | HPP_FCL_DECLARE_SHAPE_TRIANGLE(Shape, doc) |
| hpp::fcl::HPP_FCL_DECLARE_SHAPE_TRIANGLE (Sphere,) | |
| hpp::fcl::HPP_FCL_DECLARE_SHAPE_TRIANGLE (Halfspace,) | |
| hpp::fcl::HPP_FCL_DECLARE_SHAPE_TRIANGLE (Plane,) | |
Shape distance specializations | |
| #define | HPP_FCL_DECLARE_SHAPE_DISTANCE(Shape1, Shape2, doc) |
| #define | HPP_FCL_DECLARE_SHAPE_DISTANCE_SELF(Shape, doc) HPP_FCL_DECLARE_SHAPE_DISTANCE(Shape, Shape, doc) |
| #define | HPP_FCL_DECLARE_SHAPE_DISTANCE_PAIR(Shape1, Shape2, doc) |
| hpp::fcl::HPP_FCL_DECLARE_SHAPE_DISTANCE_PAIR (Sphere, Box,) | |
| hpp::fcl::HPP_FCL_DECLARE_SHAPE_DISTANCE_PAIR (Sphere, Capsule,) | |
| hpp::fcl::HPP_FCL_DECLARE_SHAPE_DISTANCE_PAIR (Sphere, Cylinder,) | |
| hpp::fcl::HPP_FCL_DECLARE_SHAPE_DISTANCE_SELF (Sphere,) | |
| hpp::fcl::HPP_FCL_DECLARE_SHAPE_DISTANCE_SELF (Capsule,) | |
| hpp::fcl::HPP_FCL_DECLARE_SHAPE_DISTANCE_SELF (TriangleP,) | |
Macro Definition Documentation
◆ HPP_FCL_DECLARE_SHAPE_DISTANCE
| #define HPP_FCL_DECLARE_SHAPE_DISTANCE | ( | Shape1, | |
| Shape2, | |||
| doc | |||
| ) |
Value:
\
doc template <> \
bool HPP_FCL_DLLAPI GJKSolver::shapeDistance<Shape1, Shape2>( \
Vec3f& normal) const
Definition at line 689 of file narrowphase.h.
◆ HPP_FCL_DECLARE_SHAPE_DISTANCE_PAIR
| #define HPP_FCL_DECLARE_SHAPE_DISTANCE_PAIR | ( | Shape1, | |
| Shape2, | |||
| doc | |||
| ) |
Value:
HPP_FCL_DECLARE_SHAPE_DISTANCE(Shape1, Shape2, doc); \
HPP_FCL_DECLARE_SHAPE_DISTANCE(Shape2, Shape1, doc)
#define HPP_FCL_DECLARE_SHAPE_DISTANCE(Shape1, Shape2, doc)
Definition: narrowphase.h:689
Definition at line 698 of file narrowphase.h.
◆ HPP_FCL_DECLARE_SHAPE_DISTANCE_SELF
| #define HPP_FCL_DECLARE_SHAPE_DISTANCE_SELF | ( | Shape, | |
| doc | |||
| ) | HPP_FCL_DECLARE_SHAPE_DISTANCE(Shape, Shape, doc) |
Definition at line 696 of file narrowphase.h.
◆ HPP_FCL_DECLARE_SHAPE_INTERSECT
| #define HPP_FCL_DECLARE_SHAPE_INTERSECT | ( | Shape1, | |
| Shape2, | |||
| doc | |||
| ) |
Value:
\
doc template <> \
HPP_FCL_DLLAPI bool GJKSolver::shapeIntersect<Shape1, Shape2>( \
Definition: distance_lower_bound.py:1
Definition at line 605 of file narrowphase.h.
◆ HPP_FCL_DECLARE_SHAPE_INTERSECT_PAIR
| #define HPP_FCL_DECLARE_SHAPE_INTERSECT_PAIR | ( | Shape1, | |
| Shape2, | |||
| doc | |||
| ) |
Value:
HPP_FCL_DECLARE_SHAPE_INTERSECT(Shape1, Shape2, doc); \
HPP_FCL_DECLARE_SHAPE_INTERSECT(Shape2, Shape1, doc)
#define HPP_FCL_DECLARE_SHAPE_INTERSECT(Shape1, Shape2, doc)
Definition: narrowphase.h:605
Definition at line 614 of file narrowphase.h.
◆ HPP_FCL_DECLARE_SHAPE_INTERSECT_SELF
| #define HPP_FCL_DECLARE_SHAPE_INTERSECT_SELF | ( | Shape, | |
| doc | |||
| ) | HPP_FCL_DECLARE_SHAPE_INTERSECT(Shape, Shape, doc) |
Definition at line 612 of file narrowphase.h.
◆ HPP_FCL_DECLARE_SHAPE_TRIANGLE
| #define HPP_FCL_DECLARE_SHAPE_TRIANGLE | ( | Shape, | |
| doc | |||
| ) |
Value:
\
doc template <> \
HPP_FCL_DLLAPI bool GJKSolver::shapeTriangleInteraction<Shape>( \
double distance(const std::vector< Transform3f > &tf, const BVHModel< BV > &m1, const BVHModel< BV > &m2, bool verbose)
Definition: benchmark.cpp:93
Definition at line 668 of file narrowphase.h.
◆ SHAPE_DISTANCE_SPECIALIZATION
| #define SHAPE_DISTANCE_SPECIALIZATION | ( | S1, | |
| S2 | |||
| ) |
Value:
SHAPE_DISTANCE_SPECIALIZATION_BASE(S1, S2); \
SHAPE_DISTANCE_SPECIALIZATION_BASE(S2, S1)
#define SHAPE_DISTANCE_SPECIALIZATION_BASE(S1, S2)
Definition: narrowphase.h:575
Definition at line 582 of file narrowphase.h.
◆ SHAPE_DISTANCE_SPECIALIZATION_BASE
| #define SHAPE_DISTANCE_SPECIALIZATION_BASE | ( | S1, | |
| S2 | |||
| ) |
Value:
template <> \
HPP_FCL_DLLAPI bool GJKSolver::shapeDistance<S1, S2>( \
Vec3f& normal) const
Definition at line 575 of file narrowphase.h.
◆ SHAPE_INTERSECT_SPECIALIZATION
| #define SHAPE_INTERSECT_SPECIALIZATION | ( | S1, | |
| S2 | |||
| ) |
Value:
SHAPE_INTERSECT_SPECIALIZATION_BASE(S1, S2); \
SHAPE_INTERSECT_SPECIALIZATION_BASE(S2, S1)
#define SHAPE_INTERSECT_SPECIALIZATION_BASE(S1, S2)
Definition: narrowphase.h:544
Definition at line 551 of file narrowphase.h.
◆ SHAPE_INTERSECT_SPECIALIZATION_BASE
| #define SHAPE_INTERSECT_SPECIALIZATION_BASE | ( | S1, | |
| S2 | |||
| ) |
Value:
template <> \
HPP_FCL_DLLAPI bool GJKSolver::shapeIntersect<S1, S2>( \
Vec3f* contact_points, Vec3f* normal) const
Definition: distance_lower_bound.py:1
Definition at line 544 of file narrowphase.h.