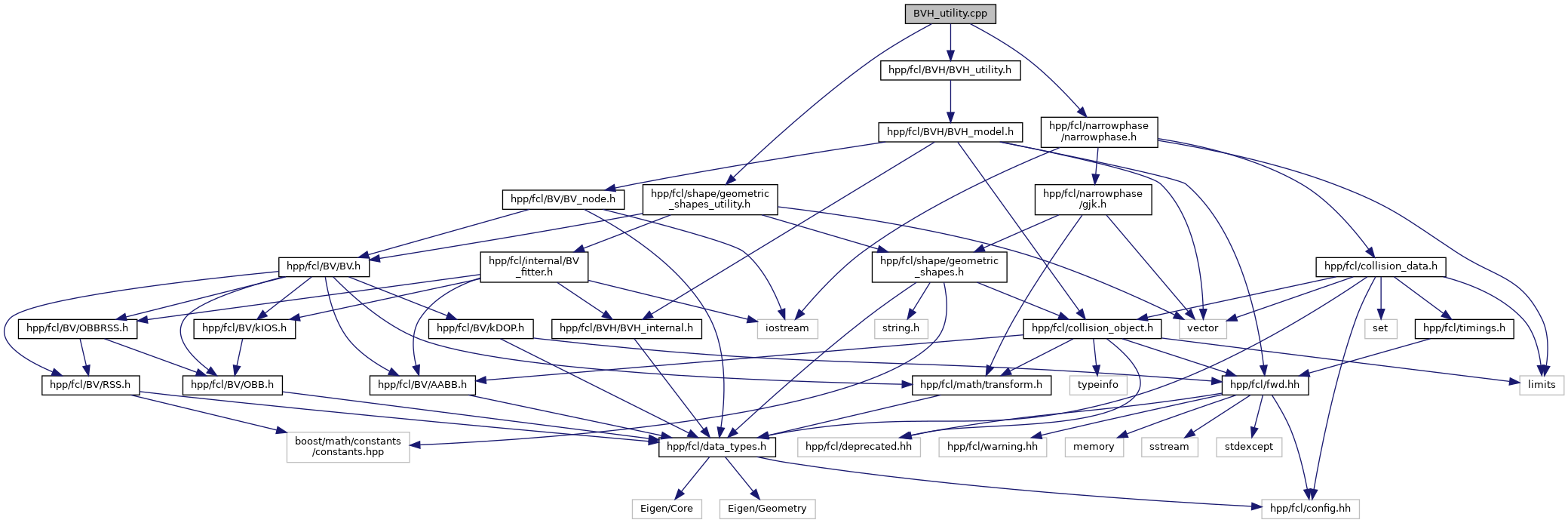
#include <hpp/fcl/BVH/BVH_utility.h>#include <hpp/fcl/narrowphase/narrowphase.h>#include <hpp/fcl/shape/geometric_shapes_utility.h>
Include dependency graph for BVH_utility.cpp:
Go to the source code of this file.
Namespaces | |
| hpp | |
| Main namespace. | |
| hpp::fcl | |
| hpp::fcl::details | |
Functions | |
| template<typename BV > | |
| BVHModel< BV > * | hpp::fcl::details::BVHExtract (const BVHModel< BV > &model, const Transform3f &pose, const AABB &_aabb) |
| Extract the part of the BVHModel that is inside an AABB. A triangle in collision with the AABB is considered inside. More... | |
| template<> | |
| BVHModel< OBB > * | hpp::fcl::BVHExtract (const BVHModel< OBB > &model, const Transform3f &pose, const AABB &aabb) |
| template<> | |
| BVHModel< AABB > * | hpp::fcl::BVHExtract (const BVHModel< AABB > &model, const Transform3f &pose, const AABB &aabb) |
| template<> | |
| BVHModel< RSS > * | hpp::fcl::BVHExtract (const BVHModel< RSS > &model, const Transform3f &pose, const AABB &aabb) |
| template<> | |
| BVHModel< kIOS > * | hpp::fcl::BVHExtract (const BVHModel< kIOS > &model, const Transform3f &pose, const AABB &aabb) |
| template<> | |
| BVHModel< OBBRSS > * | hpp::fcl::BVHExtract (const BVHModel< OBBRSS > &model, const Transform3f &pose, const AABB &aabb) |
| template<> | |
| BVHModel< KDOP< 16 > > * | hpp::fcl::BVHExtract (const BVHModel< KDOP< 16 > > &model, const Transform3f &pose, const AABB &aabb) |
| template<> | |
| BVHModel< KDOP< 18 > > * | hpp::fcl::BVHExtract (const BVHModel< KDOP< 18 > > &model, const Transform3f &pose, const AABB &aabb) |
| template<> | |
| BVHModel< KDOP< 24 > > * | hpp::fcl::BVHExtract (const BVHModel< KDOP< 24 > > &model, const Transform3f &pose, const AABB &aabb) |
| HPP_FCL_DLLAPI void | hpp::fcl::circumCircleComputation (const Vec3f &a, const Vec3f &b, const Vec3f &c, Vec3f ¢er, FCL_REAL &radius) |
| Compute the center and radius for a triangle's circumcircle. More... | |
| HPP_FCL_DLLAPI void | hpp::fcl::getCovariance (Vec3f *ps, Vec3f *ps2, Triangle *ts, unsigned int *indices, unsigned int n, Matrix3f &M) |
| Compute the covariance matrix for a set or subset of points. if ts = null, then indices refer to points directly; otherwise refer to triangles. More... | |
| HPP_FCL_DLLAPI void | hpp::fcl::getExtentAndCenter (Vec3f *ps, Vec3f *ps2, Triangle *ts, unsigned int *indices, unsigned int n, Matrix3f &axes, Vec3f ¢er, Vec3f &extent) |
| Compute the bounding volume extent and center for a set or subset of points, given the BV axises. More... | |
| static void | hpp::fcl::getExtentAndCenter_mesh (Vec3f *ps, Vec3f *ps2, Triangle *ts, unsigned int *indices, unsigned int n, Matrix3f &axes, Vec3f ¢er, Vec3f &extent) |
| Compute the bounding volume extent and center for a set or subset of points. The bounding volume axes are known. More... | |
| static void | hpp::fcl::getExtentAndCenter_pointcloud (Vec3f *ps, Vec3f *ps2, unsigned int *indices, unsigned int n, Matrix3f &axes, Vec3f ¢er, Vec3f &extent) |
| Compute the bounding volume extent and center for a set or subset of points. The bounding volume axes are known. More... | |
| HPP_FCL_DLLAPI void | hpp::fcl::getRadiusAndOriginAndRectangleSize (Vec3f *ps, Vec3f *ps2, Triangle *ts, unsigned int *indices, unsigned int n, const Matrix3f &axes, Vec3f &origin, FCL_REAL l[2], FCL_REAL &r) |
| Compute the RSS bounding volume parameters: radius, rectangle size and the origin, given the BV axises. More... | |
| HPP_FCL_DLLAPI FCL_REAL | hpp::fcl::maximumDistance (Vec3f *ps, Vec3f *ps2, Triangle *ts, unsigned int *indices, unsigned int n, const Vec3f &query) |
| Compute the maximum distance from a given center point to a point cloud. More... | |
| static FCL_REAL | hpp::fcl::maximumDistance_mesh (Vec3f *ps, Vec3f *ps2, Triangle *ts, unsigned int *indices, unsigned int n, const Vec3f &query) |
| static FCL_REAL | hpp::fcl::maximumDistance_pointcloud (Vec3f *ps, Vec3f *ps2, unsigned int *indices, unsigned int n, const Vec3f &query) |