#include <iostream>#include <CppUnitLite/TestHarness.h>#include <gtsam/base/Testable.h>#include <gtsam/base/numericalDerivative.h>#include <gtsam/geometry/Pose2.h>#include <gtsam/inference/Symbol.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/NonlinearEquality.h>#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>#include <gtsam/slam/ReferenceFrameFactor.h>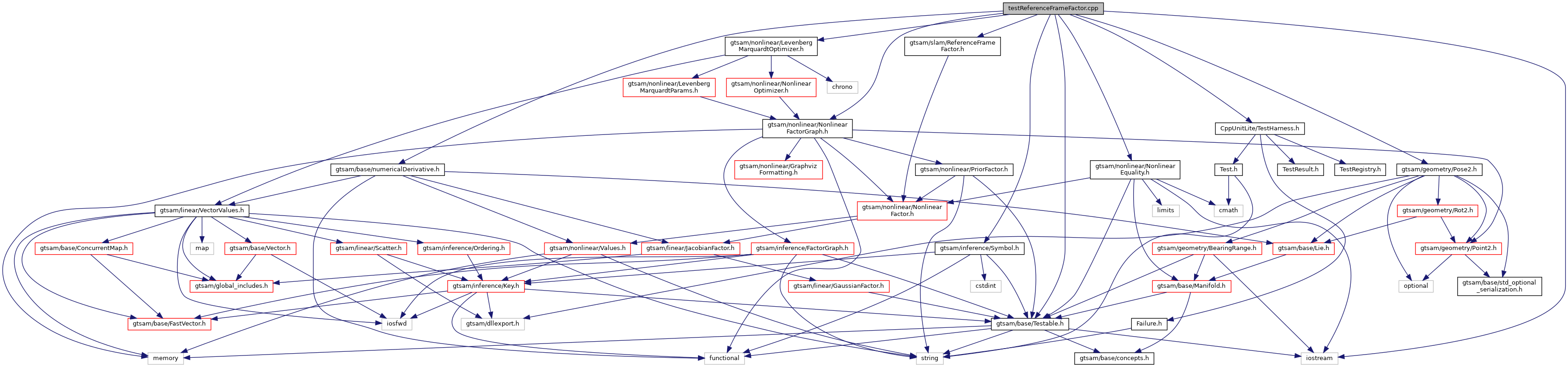
Go to the source code of this file.
Typedefs | |
| typedef gtsam::ReferenceFrameFactor< gtsam::Point2, gtsam::Pose2 > | PointReferenceFrameFactor |
| typedef gtsam::ReferenceFrameFactor< gtsam::Pose2, gtsam::Pose2 > | PoseReferenceFrameFactor |
Functions | |
| Vector | evaluateError_ (const PointReferenceFrameFactor &c, const Point2 &global, const Pose2 &trans, const Point2 &local) |
| int | main () |
| TEST (ReferenceFrameFactor, equals) | |
| TEST (ReferenceFrameFactor, jacobians) | |
| TEST (ReferenceFrameFactor, jacobians_zero) | |
| TEST (ReferenceFrameFactor, converge_trans) | |
| TEST (ReferenceFrameFactor, converge_local) | |
| TEST (ReferenceFrameFactor, converge_global) | |
Variables | |
| Key | lA1 = symbol_shorthand::L(1) |
| Key | lA2 = symbol_shorthand::L(2) |
| Key | lB1 = symbol_shorthand::L(11) |
| Key | lB2 = symbol_shorthand::L(12) |
| Key | tA1 = symbol_shorthand::T(1) |
| Key | tB1 = symbol_shorthand::T(2) |
Typedef Documentation
◆ PointReferenceFrameFactor
Definition at line 36 of file testReferenceFrameFactor.cpp.
◆ PoseReferenceFrameFactor
Definition at line 37 of file testReferenceFrameFactor.cpp.
Function Documentation
◆ evaluateError_()
| Vector evaluateError_ | ( | const PointReferenceFrameFactor & | c, |
| const Point2 & | global, | ||
| const Pose2 & | trans, | ||
| const Point2 & | local | ||
| ) |
Definition at line 55 of file testReferenceFrameFactor.cpp.
◆ main()
| int main | ( | void | ) |
Definition at line 244 of file testReferenceFrameFactor.cpp.
◆ TEST() [1/6]
| TEST | ( | ReferenceFrameFactor | , |
| equals | |||
| ) |
Definition at line 43 of file testReferenceFrameFactor.cpp.
◆ TEST() [2/6]
| TEST | ( | ReferenceFrameFactor | , |
| jacobians | |||
| ) |
Definition at line 59 of file testReferenceFrameFactor.cpp.
◆ TEST() [3/6]
| TEST | ( | ReferenceFrameFactor | , |
| jacobians_zero | |||
| ) |
Definition at line 86 of file testReferenceFrameFactor.cpp.
◆ TEST() [4/6]
| TEST | ( | ReferenceFrameFactor | , |
| converge_trans | |||
| ) |
Definition at line 118 of file testReferenceFrameFactor.cpp.
◆ TEST() [5/6]
| TEST | ( | ReferenceFrameFactor | , |
| converge_local | |||
| ) |
Definition at line 171 of file testReferenceFrameFactor.cpp.
◆ TEST() [6/6]
| TEST | ( | ReferenceFrameFactor | , |
| converge_global | |||
| ) |
Definition at line 207 of file testReferenceFrameFactor.cpp.
Variable Documentation
◆ lA1
| Key lA1 = symbol_shorthand::L(1) |
Definition at line 39 of file testReferenceFrameFactor.cpp.
◆ lA2
| Key lA2 = symbol_shorthand::L(2) |
Definition at line 39 of file testReferenceFrameFactor.cpp.
◆ lB1
| Key lB1 = symbol_shorthand::L(11) |
Definition at line 39 of file testReferenceFrameFactor.cpp.
◆ lB2
| Key lB2 = symbol_shorthand::L(12) |
Definition at line 39 of file testReferenceFrameFactor.cpp.
◆ tA1
| Key tA1 = symbol_shorthand::T(1) |
Definition at line 40 of file testReferenceFrameFactor.cpp.
◆ tB1
| Key tB1 = symbol_shorthand::T(2) |
Definition at line 40 of file testReferenceFrameFactor.cpp.