Unit tests for Pose3 class. More...
#include <gtsam/geometry/Pose3.h>#include <gtsam/geometry/Pose2.h>#include <gtsam/base/testLie.h>#include <gtsam/base/lieProxies.h>#include <gtsam/base/TestableAssertions.h>#include <CppUnitLite/TestHarness.h>#include <cmath>#include <functional>#include "testPoseAdjointMap.h"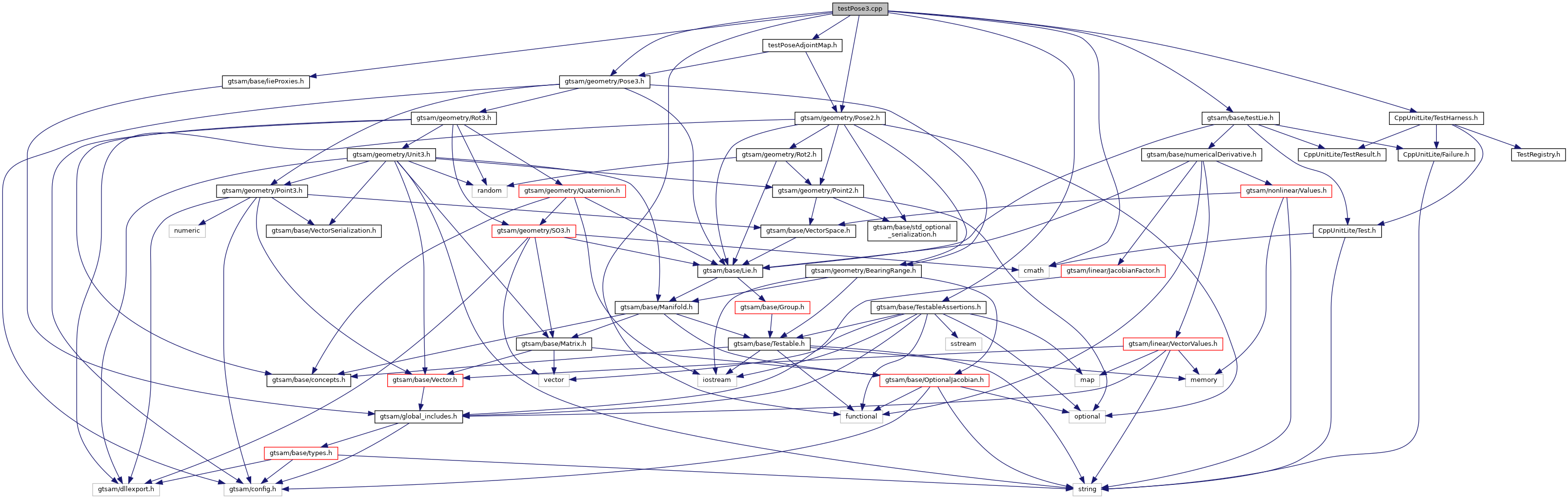
Go to the source code of this file.
Namespaces | |
| screwPose3 | |
Functions | |
| Pose3 | Agrawal06iros (const Vector &xi) |
| Unit3 | bearing_proxy (const Pose3 &pose, const Point3 &point) |
| Rot3 | screwPose3::expectedR (c, -s, 0, s, c, 0, 0, 0, 1) |
| Point3 | screwPose3::expectedT (0.29552, 0.0446635, 1) |
| Point3 | l1 (1, 0, 0) |
| Point3 | l2 (1, 1, 0) |
| Point3 | l3 (2, 2, 0) |
| Point3 | l4 (1, 4,-4) |
| int | main () |
| static const Point3 | P (0.2, 0.7,-2) |
| static const Point3 | P2 (3.5,-8.2, 4.2) |
| double | range_pose_proxy (const Pose3 &pose, const Pose3 &point) |
| double | range_proxy (const Pose3 &pose, const Point3 &point) |
| TEST (Pose3, equals) | |
| TEST (Pose3, constructors) | |
| TEST (Pose3, retract_first_order) | |
| TEST (Pose3, retract_expmap) | |
| TEST (Pose3, expmap_a_full) | |
| TEST (Pose3, expmap_a_full2) | |
| TEST (Pose3, expmap_b) | |
| TEST (Pose3, expmap_c_full) | |
| TEST (Pose3, Adjoint_full) | |
| TEST (Pose3, Adjoint_jacobians) | |
| TEST (Pose3, AdjointTranspose) | |
| TEST (Pose3, Adjoint_hat) | |
| TEST (Pose3, expmaps_galore_full) | |
| TEST (Pose3, translation) | |
| TEST (Pose3, rotation) | |
| TEST (Pose3, Adjoint_compose_full) | |
| TEST (Pose3, compose) | |
| TEST (Pose3, compose2) | |
| TEST (Pose3, inverse) | |
| TEST (Pose3, inverseDerivatives2) | |
| TEST (Pose3, compose_inverse) | |
| TEST (Pose3, Dtransform_from1_a) | |
| TEST (Pose3, Dtransform_from1_b) | |
| TEST (Pose3, Dtransform_from1_c) | |
| TEST (Pose3, Dtransform_from1_d) | |
| TEST (Pose3, Dtransform_from2) | |
| TEST (Pose3, Dtransform_to1) | |
| TEST (Pose3, Dtransform_to2) | |
| TEST (Pose3, transform_to_with_derivatives) | |
| TEST (Pose3, transform_from_with_derivatives) | |
| TEST (Pose3, transform_to_translate) | |
| TEST (Pose3, transform_to_rotate) | |
| TEST (Pose3, transformPoseFrom) | |
| TEST (Pose3, transformTo) | |
| TEST (Pose3, transformPoseTo) | |
| TEST (Pose3, transformPoseTo_with_derivatives) | |
| TEST (Pose3, transformPoseTo_with_derivatives2) | |
| TEST (Pose3, transformFrom) | |
| TEST (Pose3, transform_roundtrip) | |
| TEST (Pose3, Retract_LocalCoordinates) | |
| TEST (Pose3, retract_localCoordinates) | |
| TEST (Pose3, expmap_logmap) | |
| TEST (Pose3, retract_localCoordinates2) | |
| TEST (Pose3, manifold_expmap) | |
| TEST (Pose3, subgroups) | |
| TEST (Pose3, between) | |
| TEST (Pose3, range) | |
| TEST (Pose3, range_pose) | |
| TEST (Pose3, Bearing) | |
| TEST (Pose3, Bearing2) | |
| TEST (Pose3, PoseToPoseBearing) | |
| TEST (Pose3, unicycle) | |
| TEST (Pose3, adjointMap) | |
| TEST (Pose3, Align1) | |
| TEST (Pose3, Align2) | |
| TEST (Pose3, ExpmapDerivative1) | |
| TEST (Pose3, ExpmapDerivative2) | |
| TEST (Pose3, ExpmapDerivativeQr) | |
| TEST (Pose3, LogmapDerivative) | |
| TEST (Pose3, adjoint) | |
| TEST (Pose3, adjointTranspose) | |
| TEST (Pose3, stream) | |
| TEST (Pose3, Invariants) | |
| TEST (Pose3, LieGroupDerivatives) | |
| TEST (Pose3, ChartDerivatives) | |
| TEST (Pose3, TransformCovariance6MapTo2d) | |
| TEST (Pose3, TransformCovariance6) | |
| TEST (Pose3, interpolate) | |
| TEST (Pose3, interpolateJacobians) | |
| TEST (Pose3, Create) | |
| TEST (Pose3, Print) | |
| Vector6 | testDerivAdjoint (const Vector6 &xi, const Vector6 &v) |
| Vector6 | testDerivAdjointTranspose (const Vector6 &xi, const Vector6 &v) |
| Pose3 | testing_interpolate (const Pose3 &t1, const Pose3 &t2, double gamma) |
| Point3 | transform_to_ (const Pose3 &pose, const Point3 &point) |
| Point3 | transformFrom_ (const Pose3 &pose, const Point3 &point) |
| Pose3 | transformPoseFrom_ (const Pose3 &wTa, const Pose3 &aTb) |
| Pose3 | transformPoseTo_ (const Pose3 &pose, const Pose3 &pose2) |
Variables | |
| double | screwPose3::a =0.3 |
| double | screwPose3::c =cos(a) |
| Pose3 | screwPose3::expected (expectedR, expectedT) |
| static const Rot3 | R = Rot3::Rodrigues(0.3,0,0) |
| double | screwPose3::s =sin(a) |
| static const Pose3 | T (R, P2) |
| static const Pose3 | T2 (Rot3::Rodrigues(0.3, 0.2, 0.1), P2) |
| static const Pose3 | T3 (Rot3::Rodrigues(-90, 0, 0), Point3(1, 2, 3)) |
| static const double | tol =1e-5 |
| double | screwPose3::w =0.3 |
| Pose3 | x1 |
| Pose3 | x2 (Rot3::Ypr(0.0, 0.0, 0.0), l2) |
| Pose3 | x3 (Rot3::Ypr(M_PI/4.0, 0.0, 0.0), l2) |
| Vector | screwPose3::xi = (Vector(6) << 0.0, 0.0, w, w, 0.0, 1.0).finished() |
| Pose3 | xl1 (Rot3::Ypr(0.0, 0.0, 0.0), Point3(1, 0, 0)) |
| Pose3 | xl2 (Rot3::Ypr(0.0, 1.0, 0.0), Point3(1, 1, 0)) |
| Pose3 | xl3 (Rot3::Ypr(1.0, 0.0, 0.0), Point3(2, 2, 0)) |
| Pose3 | xl4 (Rot3::Ypr(0.0, 0.0, 1.0), Point3(1, 4,-4)) |
Detailed Description
Unit tests for Pose3 class.
Definition in file testPose3.cpp.
Function Documentation
◆ Agrawal06iros()
Agrawal06iros version of exponential map
Definition at line 242 of file testPose3.cpp.
◆ bearing_proxy()
Definition at line 741 of file testPose3.cpp.
◆ l1()
| Point3 l1 | ( | 1 | , |
| 0 | , | ||
| 0 | |||
| ) |
◆ l2()
| Point3 l2 | ( | 1 | , |
| 1 | , | ||
| 0 | |||
| ) |
◆ l3()
| Point3 l3 | ( | 2 | , |
| 2 | , | ||
| 0 | |||
| ) |
◆ l4()
| Point3 l4 | ( | 1 | , |
| 4 | , | ||
| - | 4 | ||
| ) |
◆ main()
| int main | ( | void | ) |
Definition at line 1211 of file testPose3.cpp.
◆ P()
|
static |
◆ P2()
|
static |
◆ range_pose_proxy()
Definition at line 706 of file testPose3.cpp.
◆ range_proxy()
Definition at line 671 of file testPose3.cpp.
◆ TEST() [1/71]
Definition at line 44 of file testPose3.cpp.
◆ TEST() [2/71]
| TEST | ( | Pose3 | , |
| constructors | |||
| ) |
Definition at line 53 of file testPose3.cpp.
◆ TEST() [3/71]
| TEST | ( | Pose3 | , |
| retract_first_order | |||
| ) |
Definition at line 62 of file testPose3.cpp.
◆ TEST() [4/71]
| TEST | ( | Pose3 | , |
| retract_expmap | |||
| ) |
Definition at line 73 of file testPose3.cpp.
◆ TEST() [5/71]
| TEST | ( | Pose3 | , |
| expmap_a_full | |||
| ) |
Definition at line 82 of file testPose3.cpp.
◆ TEST() [6/71]
| TEST | ( | Pose3 | , |
| expmap_a_full2 | |||
| ) |
Definition at line 93 of file testPose3.cpp.
◆ TEST() [7/71]
| TEST | ( | Pose3 | , |
| expmap_b | |||
| ) |
Definition at line 104 of file testPose3.cpp.
◆ TEST() [8/71]
| TEST | ( | Pose3 | , |
| expmap_c_full | |||
| ) |
Definition at line 124 of file testPose3.cpp.
◆ TEST() [9/71]
| TEST | ( | Pose3 | , |
| Adjoint_full | |||
| ) |
Definition at line 132 of file testPose3.cpp.
◆ TEST() [10/71]
| TEST | ( | Pose3 | , |
| Adjoint_jacobians | |||
| ) |
Definition at line 149 of file testPose3.cpp.
◆ TEST() [11/71]
| TEST | ( | Pose3 | , |
| AdjointTranspose | |||
| ) |
Definition at line 184 of file testPose3.cpp.
◆ TEST() [12/71]
| TEST | ( | Pose3 | , |
| Adjoint_hat | |||
| ) |
Definition at line 224 of file testPose3.cpp.
◆ TEST() [13/71]
| TEST | ( | Pose3 | , |
| expmaps_galore_full | |||
| ) |
Definition at line 256 of file testPose3.cpp.
◆ TEST() [14/71]
| TEST | ( | Pose3 | , |
| translation | |||
| ) |
Definition at line 286 of file testPose3.cpp.
◆ TEST() [15/71]
| TEST | ( | Pose3 | , |
| rotation | |||
| ) |
Definition at line 297 of file testPose3.cpp.
◆ TEST() [16/71]
| TEST | ( | Pose3 | , |
| Adjoint_compose_full | |||
| ) |
Definition at line 307 of file testPose3.cpp.
◆ TEST() [17/71]
| TEST | ( | Pose3 | , |
| compose | |||
| ) |
Definition at line 322 of file testPose3.cpp.
◆ TEST() [18/71]
| TEST | ( | Pose3 | , |
| compose2 | |||
| ) |
Definition at line 341 of file testPose3.cpp.
◆ TEST() [19/71]
Definition at line 360 of file testPose3.cpp.
◆ TEST() [20/71]
| TEST | ( | Pose3 | , |
| inverseDerivatives2 | |||
| ) |
Definition at line 373 of file testPose3.cpp.
◆ TEST() [21/71]
| TEST | ( | Pose3 | , |
| compose_inverse | |||
| ) |
Definition at line 387 of file testPose3.cpp.
◆ TEST() [22/71]
| TEST | ( | Pose3 | , |
| Dtransform_from1_a | |||
| ) |
Definition at line 398 of file testPose3.cpp.
◆ TEST() [23/71]
| TEST | ( | Pose3 | , |
| Dtransform_from1_b | |||
| ) |
Definition at line 405 of file testPose3.cpp.
◆ TEST() [24/71]
| TEST | ( | Pose3 | , |
| Dtransform_from1_c | |||
| ) |
Definition at line 413 of file testPose3.cpp.
◆ TEST() [25/71]
| TEST | ( | Pose3 | , |
| Dtransform_from1_d | |||
| ) |
Definition at line 422 of file testPose3.cpp.
◆ TEST() [26/71]
| TEST | ( | Pose3 | , |
| Dtransform_from2 | |||
| ) |
Definition at line 435 of file testPose3.cpp.
◆ TEST() [27/71]
| TEST | ( | Pose3 | , |
| Dtransform_to1 | |||
| ) |
Definition at line 446 of file testPose3.cpp.
◆ TEST() [28/71]
| TEST | ( | Pose3 | , |
| Dtransform_to2 | |||
| ) |
Definition at line 454 of file testPose3.cpp.
◆ TEST() [29/71]
| TEST | ( | Pose3 | , |
| transform_to_with_derivatives | |||
| ) |
Definition at line 462 of file testPose3.cpp.
◆ TEST() [30/71]
| TEST | ( | Pose3 | , |
| transform_from_with_derivatives | |||
| ) |
Definition at line 472 of file testPose3.cpp.
◆ TEST() [31/71]
| TEST | ( | Pose3 | , |
| transform_to_translate | |||
| ) |
Definition at line 482 of file testPose3.cpp.
◆ TEST() [32/71]
| TEST | ( | Pose3 | , |
| transform_to_rotate | |||
| ) |
Definition at line 490 of file testPose3.cpp.
◆ TEST() [33/71]
| TEST | ( | Pose3 | , |
| transformPoseFrom | |||
| ) |
Definition at line 503 of file testPose3.cpp.
◆ TEST() [34/71]
| TEST | ( | Pose3 | , |
| transformTo | |||
| ) |
Definition at line 521 of file testPose3.cpp.
◆ TEST() [35/71]
| TEST | ( | Pose3 | , |
| transformPoseTo | |||
| ) |
Definition at line 533 of file testPose3.cpp.
◆ TEST() [36/71]
| TEST | ( | Pose3 | , |
| transformPoseTo_with_derivatives | |||
| ) |
Definition at line 539 of file testPose3.cpp.
◆ TEST() [37/71]
| TEST | ( | Pose3 | , |
| transformPoseTo_with_derivatives2 | |||
| ) |
Definition at line 551 of file testPose3.cpp.
◆ TEST() [38/71]
| TEST | ( | Pose3 | , |
| transformFrom | |||
| ) |
Definition at line 563 of file testPose3.cpp.
◆ TEST() [39/71]
| TEST | ( | Pose3 | , |
| transform_roundtrip | |||
| ) |
Definition at line 570 of file testPose3.cpp.
◆ TEST() [40/71]
| TEST | ( | Pose3 | , |
| Retract_LocalCoordinates | |||
| ) |
Definition at line 577 of file testPose3.cpp.
◆ TEST() [41/71]
| TEST | ( | Pose3 | , |
| retract_localCoordinates | |||
| ) |
Definition at line 586 of file testPose3.cpp.
◆ TEST() [42/71]
| TEST | ( | Pose3 | , |
| expmap_logmap | |||
| ) |
Definition at line 594 of file testPose3.cpp.
◆ TEST() [43/71]
| TEST | ( | Pose3 | , |
| retract_localCoordinates2 | |||
| ) |
Definition at line 602 of file testPose3.cpp.
◆ TEST() [44/71]
| TEST | ( | Pose3 | , |
| manifold_expmap | |||
| ) |
Definition at line 615 of file testPose3.cpp.
◆ TEST() [45/71]
| TEST | ( | Pose3 | , |
| subgroups | |||
| ) |
Definition at line 630 of file testPose3.cpp.
◆ TEST() [46/71]
| TEST | ( | Pose3 | , |
| between | |||
| ) |
Definition at line 646 of file testPose3.cpp.
◆ TEST() [47/71]
| TEST | ( | Pose3 | , |
| range | |||
| ) |
Definition at line 674 of file testPose3.cpp.
◆ TEST() [48/71]
| TEST | ( | Pose3 | , |
| range_pose | |||
| ) |
Definition at line 709 of file testPose3.cpp.
◆ TEST() [49/71]
Definition at line 744 of file testPose3.cpp.
◆ TEST() [50/71]
| TEST | ( | Pose3 | , |
| Bearing2 | |||
| ) |
Definition at line 755 of file testPose3.cpp.
◆ TEST() [51/71]
| TEST | ( | Pose3 | , |
| PoseToPoseBearing | |||
| ) |
Definition at line 766 of file testPose3.cpp.
◆ TEST() [52/71]
| TEST | ( | Pose3 | , |
| unicycle | |||
| ) |
Definition at line 788 of file testPose3.cpp.
◆ TEST() [53/71]
| TEST | ( | Pose3 | , |
| adjointMap | |||
| ) |
Definition at line 798 of file testPose3.cpp.
◆ TEST() [54/71]
| TEST | ( | Pose3 | , |
| Align1 | |||
| ) |
Definition at line 808 of file testPose3.cpp.
◆ TEST() [55/71]
| TEST | ( | Pose3 | , |
| Align2 | |||
| ) |
Definition at line 821 of file testPose3.cpp.
◆ TEST() [56/71]
| TEST | ( | Pose3 | , |
| ExpmapDerivative1 | |||
| ) |
Definition at line 838 of file testPose3.cpp.
◆ TEST() [57/71]
| TEST | ( | Pose3 | , |
| ExpmapDerivative2 | |||
| ) |
Definition at line 848 of file testPose3.cpp.
◆ TEST() [58/71]
| TEST | ( | Pose3 | , |
| ExpmapDerivativeQr | |||
| ) |
Definition at line 882 of file testPose3.cpp.
◆ TEST() [59/71]
| TEST | ( | Pose3 | , |
| LogmapDerivative | |||
| ) |
Definition at line 894 of file testPose3.cpp.
◆ TEST() [60/71]
Definition at line 909 of file testPose3.cpp.
◆ TEST() [61/71]
| TEST | ( | Pose3 | , |
| adjointTranspose | |||
| ) |
Definition at line 931 of file testPose3.cpp.
◆ TEST() [62/71]
| TEST | ( | Pose3 | , |
| stream | |||
| ) |
Definition at line 950 of file testPose3.cpp.
◆ TEST() [63/71]
| TEST | ( | Pose3 | , |
| Invariants | |||
| ) |
Definition at line 959 of file testPose3.cpp.
◆ TEST() [64/71]
| TEST | ( | Pose3 | , |
| LieGroupDerivatives | |||
| ) |
Definition at line 974 of file testPose3.cpp.
◆ TEST() [65/71]
| TEST | ( | Pose3 | , |
| ChartDerivatives | |||
| ) |
Definition at line 984 of file testPose3.cpp.
◆ TEST() [66/71]
| TEST | ( | Pose3 | , |
| TransformCovariance6MapTo2d | |||
| ) |
Definition at line 997 of file testPose3.cpp.
◆ TEST() [67/71]
| TEST | ( | Pose3 | , |
| TransformCovariance6 | |||
| ) |
Definition at line 1040 of file testPose3.cpp.
◆ TEST() [68/71]
| TEST | ( | Pose3 | , |
| interpolate | |||
| ) |
Definition at line 1094 of file testPose3.cpp.
◆ TEST() [69/71]
| TEST | ( | Pose3 | , |
| interpolateJacobians | |||
| ) |
Definition at line 1129 of file testPose3.cpp.
◆ TEST() [70/71]
| TEST | ( | Pose3 | , |
| Create | |||
| ) |
Definition at line 1189 of file testPose3.cpp.
◆ TEST() [71/71]
| TEST | ( | Pose3 | , |
| ) |
Definition at line 1201 of file testPose3.cpp.
◆ testDerivAdjoint()
| Vector6 testDerivAdjoint | ( | const Vector6 & | xi, |
| const Vector6 & | v | ||
| ) |
Definition at line 905 of file testPose3.cpp.
◆ testDerivAdjointTranspose()
| Vector6 testDerivAdjointTranspose | ( | const Vector6 & | xi, |
| const Vector6 & | v | ||
| ) |
Definition at line 927 of file testPose3.cpp.
◆ testing_interpolate()
Definition at line 1127 of file testPose3.cpp.
◆ transform_to_()
Definition at line 443 of file testPose3.cpp.
◆ transformFrom_()
Definition at line 395 of file testPose3.cpp.
◆ transformPoseFrom_()
Definition at line 499 of file testPose3.cpp.
◆ transformPoseTo_()
Definition at line 528 of file testPose3.cpp.
Variable Documentation
◆ R
|
static |
Definition at line 36 of file testPose3.cpp.
◆ T
◆ T2
◆ T3
◆ tol
|
static |
Definition at line 41 of file testPose3.cpp.
◆ x1
| Pose3 x1 |
Definition at line 663 of file testPose3.cpp.