#define I
Definition: main.h:112
#include <gtsam/linear/NoiseModel.h>#include <gtsam/base/TestableAssertions.h>#include <CppUnitLite/TestHarness.h>#include <iostream>#include <limits>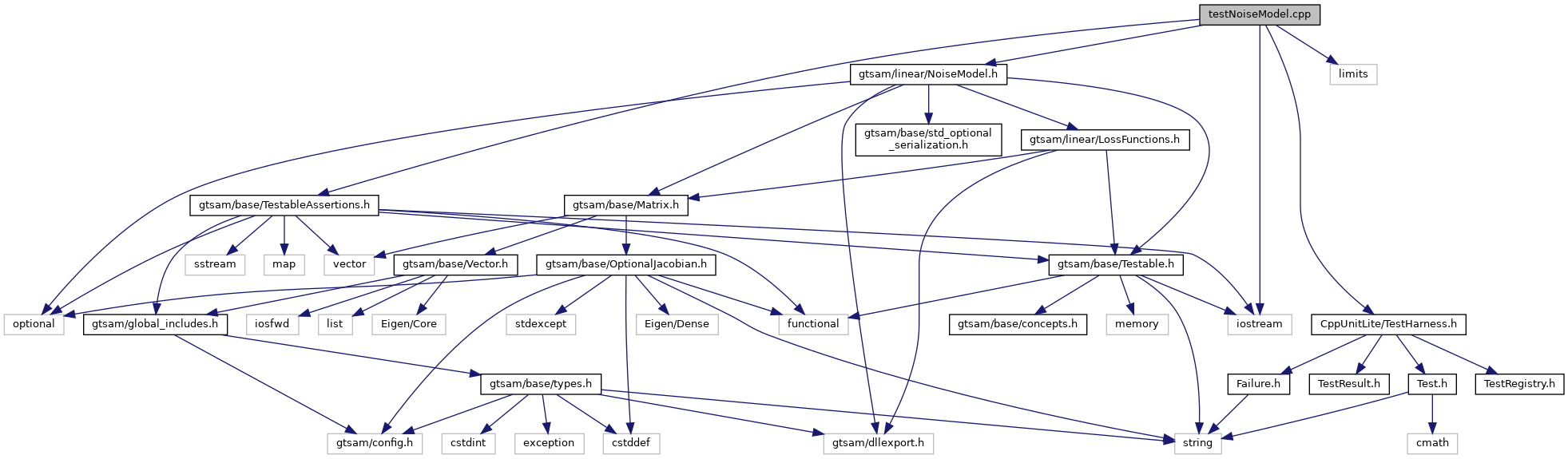
Go to the source code of this file.
Namespaces | |
| exampleQR | |
Macros | |
| #define | TEST_GAUSSIAN(gaussian) |
Functions | |
| static const Vector3 | kSigmas (kSigma, kSigma, kSigma) |
| int | main () |
| TEST (NoiseModel, constructors) | |
| TEST (NoiseModel, Unit) | |
| TEST (NoiseModel, equals) | |
| TEST (NoiseModel, ConstrainedConstructors) | |
| TEST (NoiseModel, ConstrainedMixed) | |
| TEST (NoiseModel, ConstrainedAll) | |
| TEST (NoiseModel, QR) | |
| TEST (NoiseModel, OverdeterminedQR) | |
| TEST (NoiseModel, MixedQR) | |
| TEST (NoiseModel, MixedQR2) | |
| TEST (NoiseModel, FullyConstrained) | |
| TEST (NoiseModel, QRNan) | |
| TEST (NoiseModel, SmartSqrtInformation) | |
| TEST (NoiseModel, SmartSqrtInformation2) | |
| TEST (NoiseModel, SmartInformation) | |
| TEST (NoiseModel, SmartCovariance) | |
| TEST (NoiseModel, ScalarOrVector) | |
| TEST (NoiseModel, WhitenInPlace) | |
| TEST (NoiseModel, robustFunctionFair) | |
| TEST (NoiseModel, robustFunctionHuber) | |
| TEST (NoiseModel, robustFunctionCauchy) | |
| TEST (NoiseModel, robustFunctionGemanMcClure) | |
| TEST (NoiseModel, robustFunctionWelsch) | |
| TEST (NoiseModel, robustFunctionTukey) | |
| TEST (NoiseModel, robustFunctionDCS) | |
| TEST (NoiseModel, robustFunctionL2WithDeadZone) | |
| TEST (NoiseModel, robustNoiseHuber) | |
| TEST (NoiseModel, robustNoiseGemanMcClure) | |
| TEST (NoiseModel, robustNoiseDCS) | |
| TEST (NoiseModel, robustNoiseL2WithDeadZone) | |
| TEST (NoiseModel, lossFunctionAtZero) | |
| TEST (NoiseModel, NonDiagonalGaussian) | |
Variables | |
| Matrix | exampleQR::Ab |
| SharedDiagonal | exampleQR::diagonal = noiseModel::Diagonal::Sigmas(sigmas) |
| static const Matrix | kCovariance = I_3x3 * kVariance |
| static const double | kInverseSigma = 1.0 / kSigma |
| static const double | kSigma = 2 |
| static const double | kVariance = kSigma * kSigma |
| static const double | prc = 1.0 / kVariance |
| static const Matrix | R = I_3x3 * kInverseSigma |
| Matrix | exampleQR::Rd |
| Vector | exampleQR::sigmas = (Vector(4) << 0.2, 0.2, 0.1, 0.1).finished() |
Definition in file testNoiseModel.cpp.
| #define TEST_GAUSSIAN | ( | gaussian | ) |
Definition at line 704 of file testNoiseModel.cpp.
| int main | ( | void | ) |
Definition at line 743 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| constructors | |||
| ) |
Definition at line 39 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| Unit | |||
| ) |
Definition at line 100 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| equals | |||
| ) |
Definition at line 108 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| ConstrainedConstructors | |||
| ) |
Definition at line 145 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| ConstrainedMixed | |||
| ) |
Definition at line 173 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| ConstrainedAll | |||
| ) |
Definition at line 188 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| QR | |||
| ) |
Definition at line 224 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| OverdeterminedQR | |||
| ) |
Definition at line 251 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| MixedQR | |||
| ) |
Definition at line 283 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| MixedQR2 | |||
| ) |
Definition at line 316 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| FullyConstrained | |||
| ) |
Definition at line 355 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| QRNan | |||
| ) |
Definition at line 378 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| SmartSqrtInformation | |||
| ) |
Definition at line 392 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| SmartSqrtInformation2 | |||
| ) |
Definition at line 401 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| SmartInformation | |||
| ) |
Definition at line 410 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| SmartCovariance | |||
| ) |
Definition at line 421 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| ScalarOrVector | |||
| ) |
Definition at line 430 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| WhitenInPlace | |||
| ) |
Definition at line 439 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| robustFunctionFair | |||
| ) |
Definition at line 459 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| robustFunctionHuber | |||
| ) |
Definition at line 475 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| robustFunctionCauchy | |||
| ) |
Definition at line 491 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| robustFunctionGemanMcClure | |||
| ) |
Definition at line 507 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| robustFunctionWelsch | |||
| ) |
Definition at line 522 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| robustFunctionTukey | |||
| ) |
Definition at line 538 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| robustFunctionDCS | |||
| ) |
Definition at line 554 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| robustFunctionL2WithDeadZone | |||
| ) |
Definition at line 566 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| robustNoiseHuber | |||
| ) |
Definition at line 587 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| robustNoiseGemanMcClure | |||
| ) |
Definition at line 607 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| robustNoiseDCS | |||
| ) |
Definition at line 635 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| robustNoiseL2WithDeadZone | |||
| ) |
Definition at line 658 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| lossFunctionAtZero | |||
| ) |
Definition at line 673 of file testNoiseModel.cpp.
| TEST | ( | NoiseModel | , |
| NonDiagonalGaussian | |||
| ) |
Definition at line 716 of file testNoiseModel.cpp.
Definition at line 35 of file testNoiseModel.cpp.
|
static |
Definition at line 32 of file testNoiseModel.cpp.
|
static |
Definition at line 32 of file testNoiseModel.cpp.
Definition at line 33 of file testNoiseModel.cpp.
|
static |
Definition at line 33 of file testNoiseModel.cpp.
|
static |
Definition at line 34 of file testNoiseModel.cpp.