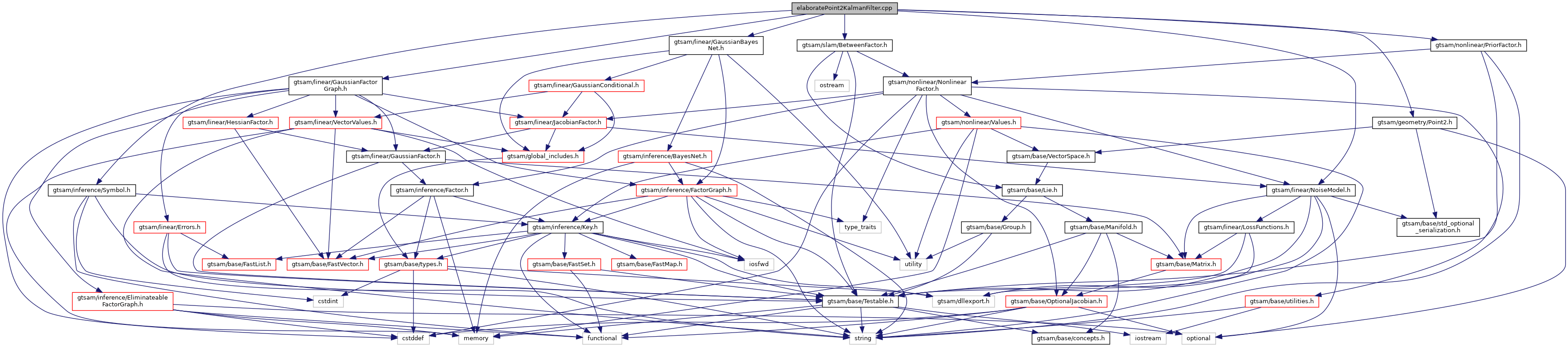
#include <gtsam/nonlinear/PriorFactor.h>#include <gtsam/slam/BetweenFactor.h>#include <gtsam/inference/Symbol.h>#include <gtsam/linear/GaussianBayesNet.h>#include <gtsam/linear/GaussianFactorGraph.h>#include <gtsam/linear/NoiseModel.h>#include <gtsam/geometry/Point2.h>
Include dependency graph for elaboratePoint2KalmanFilter.cpp:
Go to the source code of this file.
Functions | |
| int | main () |
Detailed Description
simple linear Kalman filter on a moving 2D point, but done using factor graphs This example manually creates all of the needed data structures
- Date
- Aug 19, 2011
Definition in file elaboratePoint2KalmanFilter.cpp.
Function Documentation
◆ main()
| int main | ( | void | ) |
Definition at line 35 of file elaboratePoint2KalmanFilter.cpp.