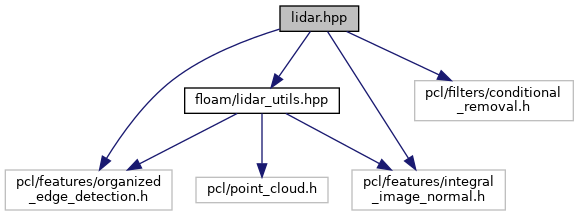
#include <pcl/features/organized_edge_detection.h>#include <pcl/features/integral_image_normal.h>#include <pcl/filters/conditional_removal.h>#include "floam/lidar_utils.hpp"
Include dependency graph for lidar.hpp:
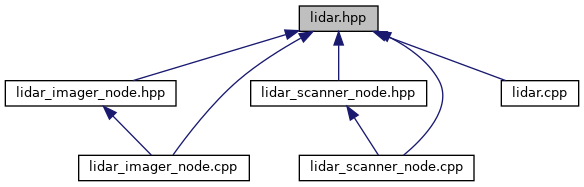
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | floam::lidar::GenericCondition< PointT > |
| class | floam::lidar::Lidar< T > |
Namespaces | |
| floam | |
| Major rewrite Author: Evan Flynn. | |
| floam::lidar | |