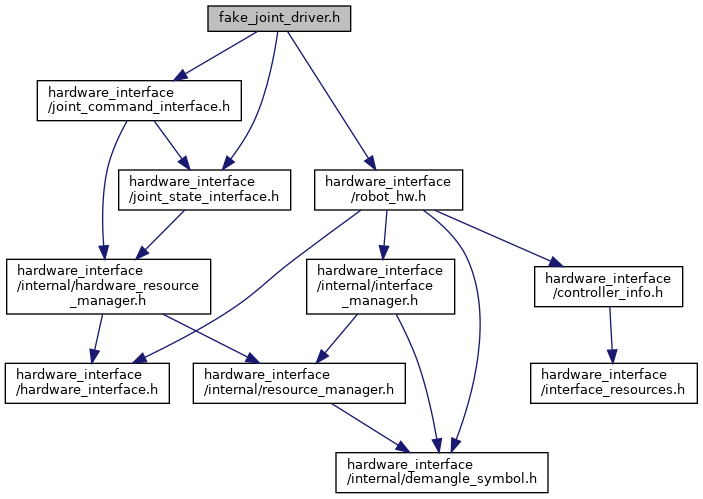
#include <hardware_interface/joint_command_interface.h>#include <hardware_interface/joint_state_interface.h>#include <hardware_interface/robot_hw.h>
Include dependency graph for fake_joint_driver.h:
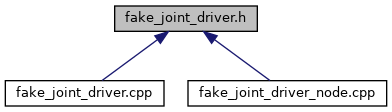
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | FakeJointDriver |
Detailed Description
- Copyright
- 2016, 2017, Tokyo Opensource Robotics Kyokai Association http://www.apache.org/licenses/LICENSE-2.0 Apache-2.0
FakeJointDriver class (only do loopback from command to status) derived from the hardware_interface class
Definition in file fake_joint_driver.h.